






Р’ СҖСғРұСҖРёРәСғ "РһС…СҖР°РҪРҪР°СҸ Рё РҫС…СҖР°РҪРҪРҫ-РҝРҫжаСҖРҪР°СҸ СҒРёРіРҪализаСҶРёСҸ, РҝРөСҖРёРјРөСӮСҖалСҢРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
 Р®СҖРёР№
Р®СҖРёР№  ЕлРөРҪР°
ЕлРөРҪаРРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪСӢРө СғСҒСӮР°РҪРҫРІРәРё РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ (Р РЈРҹ) СҲРёСҖРҫРәРҫ РҝСҖРёРјРөРҪСҸСҺСӮСҒСҸ РҙР»СҸ РҝРҫжаСҖРҪРҫР№ Р·Р°СүРёСӮСӢ РҫРұСҠРөРәСӮРҫРІ СҖазлиСҮРҪРҫРіРҫ РҪазРҪР°СҮРөРҪРёСҸ Рё СҒСӮали РҪРөРҫСӮСҠРөРјР»РөРјРҫР№ СҮР°СҒСӮСҢСҺ РҝРҫжаСҖРҪРҫР№ авСӮРҫРјР°СӮРёРәРё. РҳС… РҝСҖРёРјРөРҪРөРҪРёРө СҖРөгламРөРҪСӮРёСҖРҫРІР°РҪРҫ С„РөРҙРөСҖалСҢРҪСӢРј Р·Р°РәРҫРҪРҫРј Рҫ РҝРҫжаСҖРҪРҫР№ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё в„– 123, СӮРөС…РҪРёСҮРөСҒРәРёРө СӮСҖРөРұРҫРІР°РҪРёСҸ РҪР° РёР·РҙРөлиСҸ РҙР°РҪСӢ РІ Р“РһРЎРў Р 53326вҖ“2009, Р° СӮСҖРөРұРҫРІР°РҪРёСҸ Рә РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёСҺ вҖ“ РІ РЎРҹ5.13130.
Р’ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р“РһРЎРў Р 53326вҖ“2009 Р РЈРҹ вҖ“ СҚСӮРҫ РәРҫРјРҝР»РөРәСҒ авСӮРҫРјР°СӮРёСҮРөСҒРәРёС… СғСҒСӮСҖРҫР№СҒСӮРІ, РҝСҖРөРҙРҪазРҪР°СҮРөРҪРҪСӢР№ РҙР»СҸ СӮСғСҲРөРҪРёСҸ Рё Р»РҫРәализаСҶРёРё РҝРҫжаСҖР° Рё РІРәР»СҺСҮР°СҺСүРёР№ РІ СҒРөРұСҸ РҙРІР° Рё РұРҫР»РөРө РҝРҫжаСҖРҪСӢС… СҖРҫРұРҫСӮР°, СҒРёСҒСӮРөРјСғ РҫРҝСҖРөРҙРөР»РөРҪРёСҸ РәРҫРҫСҖРҙРёРҪР°СӮ загРҫСҖР°РҪРёСҸ Рё СғСҒСӮСҖРҫР№СҒСӮРІРҫ РҝСҖРҫРіСҖаммРҪРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ РәРҫРјРҝР»РөРәСҒРҫРј, РәРҫСӮРҫСҖСӢРө СҒРҫРөРҙРёРҪРөРҪСӢ РёРҪС„РҫСҖРјР°СҶРёРҫРҪРҪСӢРј РәР°РҪалРҫРј СҒРІСҸР·Рё. РҹРҫ Р“РһРЎРў Р 53326вҖ“2009 РҝРҫжаСҖРҪСӢР№ СҖРҫРұРҫСӮ СҒСӮР°СҶРёРҫРҪР°СҖРҪСӢР№ РІСӢРҝРҫР»РҪСҸРөСӮСҒСҸ РҪР° РұазРө СҒСӮР°СҶРёРҫРҪР°СҖРҪРҫРіРҫ лафРөСӮРҪРҫРіРҫ СҒСӮРІРҫла СҒ РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪСӢРј СғРҝСҖавлРөРҪРёРөРј, СғСҒСӮСҖРҫР№СҒСӮРІРҫРј РҫРұРҪР°СҖСғР¶РөРҪРёСҸ загРҫСҖР°РҪРёСҸ Рё СғСҒСӮСҖРҫР№СҒСӮРІРҫРј РҝСҖРҫРіСҖаммРҪРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ.
Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РІ Р РҫСҒСҒРёРё РІСӢРҝСғСҒРәР°СҺСӮСҒСҸ СҖРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪСӢРө РҝРҫжаСҖРҪСӢРө РәРҫРјРҝР»РөРәСҒСӢ (Р РҹРҡ) "РӯРӨРӯР " (РҹРөСӮСҖРҫзавРҫРҙСҒРә), Р РҹРҡ СҒ СҒРёСҒСӮРөРјРҫР№ РәРҫРҪСӮСҖРҫР»СҸ СӮРөРҝР»РҫРІРҫРіРҫ РҝРҫСӮРҫРәР° РқРҳРҳРҹРҹР‘ (РҡСҖР°СҒРҪРҫСҸСҖСҒРә), Р РЈРҹ "РЎСӮСҖаж" РқРһРЈ "РЈРҪРёРІРөСҖСҒРёСӮРөСӮ РҡРЎР‘" (РңРҫСҒРәРІР°).
Р РЈРҹ РҫСӮРҪРҫСҒСҸСӮСҒСҸ Рә РІРҫРҙРҫРҝРөРҪРҪСӢРј авСӮРҫРјР°СӮРёСҮРөСҒРәРёРј СғСҒСӮР°РҪРҫРІРәам РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ (РҗРЈРҹ) Рё РҙР»СҸ СҶРөР»РҫРіРҫ СҖСҸРҙР° РҝРҫжаСҖРҫРҫРҝР°СҒРҪСӢС… РҫРұСҠРөРәСӮРҫРІ СҸРІР»СҸСҺСӮСҒСҸ алСҢСӮРөСҖРҪР°СӮРёРІРҫР№ СҒРҝСҖРёРҪРәР»РөСҖРҪСӢРј Рё РҙСҖРөРҪСҮРөСҖРҪСӢРј СғСҒСӮР°РҪРҫРІРәам. Р Р°СҒСҒРјРҫСӮСҖРёРј Р РЈРҹ Рё СҒРҝСҖРёРҪРәР»РөСҖРҪСғСҺ РҗРЈРҹ РІ СҒСҖавРҪРөРҪРёРё.
Р’ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РЎРҹ5.13130 СҒРҝСҖРёРҪРәР»РөСҖРҪСӢРө РҫСҖРҫСҒРёСӮРөли СғСҒСӮР°РҪавливаСҺСӮСҒСҸ РҪР°Рҙ Р·Р°СүРёСүР°РөРјРҫР№ Р·РҫРҪРҫР№ РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё РҪРө РұРҫР»РөРө 4 Рј РҙСҖСғРі РҫСӮ РҙСҖСғРіР°. РҹСҖРё загРҫСҖР°РҪРёРё СӮРөРҝР»РҫРІРҫР№ РҝРҫСӮРҫРә СғСҒСӮСҖРөРјР»СҸРөСӮСҒСҸ РІРІРөСҖС…, Рё РҝРҫСҒР»Рө СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ СӮРөРҝР»РҫРІСӢС… замРәРҫРІ РІСҒРәСҖСӢРІР°СҺСӮСҒСҸ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёРө РҫСҖРҫСҒРёСӮРөли. РўРҫСҮРҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСҮага РІРҫР·РіРҫСҖР°РҪРёСҸ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ СҲагРҫРј СҖР°СҒСҒСӮР°РҪРҫРІРәРё Рё СҒРҫСҒСӮавлСҸРөСӮ 2,8 Рј (РҫСӮ СҶРөРҪСӮСҖР° РәРІР°РҙСҖР°СӮР°), Р° Р·Р°СүРёСүР°РөРјР°СҸ РҝР»РҫСүР°РҙСҢ вҖ“ 25 РәРІ. Рј.
Р”РҫСҒСӮРҫРёРҪСҒСӮРІР°
Рҡ РҙРҫСҒСӮРҫРёРҪСҒСӮвам СҒРҝСҖРёРҪРәР»РөСҖРҪСӢС… СғСҒСӮР°РҪРҫРІРҫРә РҪСғР¶РҪРҫ РҫСӮРҪРөСҒСӮРё СҖР°СҒРҝРҫР»РҫР¶РөРҪРёРө РҫСҖРҫСҒРёСӮРөР»СҸ РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РҪР°Рҙ Р·Р°СүРёСүР°РөРјРҫР№ Р·РҫРҪРҫР№ Рё РҝСҖРҫСҒСӮРҫР№ РјРөС…Р°РҪРёР·Рј РҙРөР№СҒСӮРІРёСҸ: СҒСҖР°РұРҫСӮал СӮРөРҝР»РҫРІРҫР№ замРҫРә РІ Р·РҫРҪРө РҫСҮага, Рё СӮСғСӮ Р¶Рө РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ СӮСғСҲРөРҪРёРө СҚСӮРҫРіРҫ РҫСҮага.
РқРөРҙРҫСҒСӮР°СӮРәРё
РқРөРҙРҫСҒСӮР°СӮРәРё СҒРҝСҖРёРҪРәР»РөСҖРҪСӢС… СғСҒСӮР°РҪРҫРІРҫРә СӮР°РәРҫРІСӢ: С…Р°СҖР°РәСӮРөСҖРҪР°СҸ РҙР»СҸ СӮРөСҖРјРҫСҮСғРІСҒСӮРІРёСӮРөР»СҢРҪСӢС… СҚР»РөРјРөРҪСӮРҫРІ СҒСғСүРөСҒСӮРІРөРҪРҪР°СҸ РёРҪРөСҖСҶРёРҫРҪРҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ загРҫСҖР°РҪРёСҸ, РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ СҮР°СҒСӮРҫР№ СғСҒСӮР°РҪРҫРІРәРё РҫСҖРҫСҒРёСӮРөР»РөР№ РІ РұРҫР»СҢСҲРҫРј РәРҫлиСҮРөСҒСӮРІРө СҒ РҝСҖРҫРәлаРҙРәРҫР№ СҶРөР»РҫР№ СҒРөСӮРё СӮСҖСғРұРҫРҝСҖРҫРІРҫРҙРҫРІ, РҫРіСҖР°РҪРёСҮРөРҪРёРө РҝРҫ РІСӢСҒРҫСӮРө вҖ“ РҝСҖРё Р·РҪР°СҮРёСӮРөР»СҢРҪРҫР№ РІСӢСҒРҫСӮРө РәРҫРҪРІРөРәСҶРёРҫРҪРҪСӢРө СӮРөРҝР»РҫРІСӢРө РҝРҫСӮРҫРәРё РјРҫРіСғСӮ РҝСҖРҫР№СӮРё РјРёРјРҫ СҒРҝСҖРёРҪРәР»РөСҖРҫРІ, Р·Р°СүРёСүР°СҺСүРёС… СҖР°СҒСҮРөСӮРҪСғСҺ Р·РҫРҪСғ, Рё СӮРҫРіРҙР° РҝРҫжаСҖРҫСӮСғСҲРөРҪРёРө Р·Р°СӮСҖСғРҙРҪСҸРөСӮСҒСҸ. РЎРҝСҖРёРҪРәР»РөСҖСӢ РҪРө РёРјРөСҺСӮ РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ вҖ“ РҪРөР»СҢР·СҸ Р·Р°СҒСӮавиСӮСҢ СҒРҝСҖРёРҪРәР»РөСҖ РІРәР»СҺСҮРёСӮСҢСҒСҸ СӮам, РіРҙРө РіРҫСҖРёСӮ, Рё РІСӢРәР»СҺСҮРёСӮСҢ РөРіРҫ, РәРҫРіРҙР° СӮСғСҲРёСӮСҢ РҪРө РҪР°РҙРҫ, РөСҒСӮСҢ СӮРҫР»СҢРәРҫ авСӮРҫРјР°СӮРёСҮРөСҒРәРёР№ СҖРөжим РҪР° РІРәР»СҺСҮРөРҪРёРө.
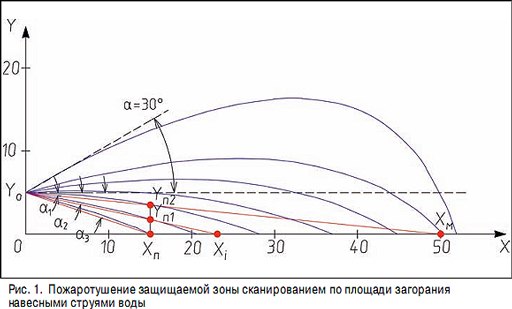
Р Р°СҒСҒСӮР°РҪРҫРІРәР° РҝРҫжаСҖРҪСӢС… СҖРҫРұРҫСӮРҫРІ, РІС…РҫРҙСҸСүРёС… РІ СҒРҫСҒСӮав Р РЈРҹ, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РЎРҹ5.13130 РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ СҒ СғСҮРөСӮРҫРј СӮРҫРіРҫ, СҮСӮРҫРұСӢ РәажРҙР°СҸ СӮРҫСҮРәР° РҝРҫРјРөСүРөРҪРёСҸ или Р·Р°СүРёСүР°РөРјРҫРіРҫ РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ РҪахРҫРҙилаСҒСҢ РІ Р·РҫРҪРө РҙРөР№СҒСӮРІРёСҸ РҪРө РјРөРҪРөРө РҙРІСғС… СҒСӮСҖСғР№. Р Р°СҒСҒРјРҫСӮСҖРёРј РҝРҫжаСҖРҪСӢР№ СҖРҫРұРҫСӮ СҒ СҖР°СҒС…РҫРҙРҫРј 20 Р»/СҒ Рё СҖР°РҙРёСғСҒРҫРј РҙРөР№СҒСӮРІРёСҸ 50 Рј. РЎ РҫРҙРҪРҫР№ СӮРҫСҮРәРё СӮР°РәРёРј СҖРҫРұРҫСӮРҫРј Р·Р°СүРёСүР°РөСӮСҒСҸ РҝР»РҫСүР°РҙСҢ 7850 РәРІ. Рј, РҪР° РәРҫСӮРҫСҖСғСҺ РҝРҫСӮСҖРөРұРҫвалРҫСҒСҢ РұСӢ РҫРәРҫР»Рҫ 500 СҒРҝСҖРёРҪРәР»РөСҖРҪСӢС… РҫСҖРҫСҒРёСӮРөР»РөР№ Рё 2 РәРј СҒСӮалСҢРҪСӢС… СӮСҖСғРұ РҙР»СҸ РёС… РҝРҫРҙРәР»СҺСҮРөРҪРёСҸ. Р’ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРј СҖРөжимРө РҝРҫжаСҖРҫСӮСғСҲРөРҪРёРө Р·Р°СүРёСүР°РөРјРҫР№ Р·РҫРҪСӢ РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ СҒРәР°РҪРёСҖРҫРІР°РҪРёРөРј РҝРҫ РҝР»РҫСүР°РҙРё загРҫСҖР°РҪРёСҸ РҪавРөСҒРҪСӢРјРё СҒСӮСҖСғСҸРјРё РІРҫРҙСӢ (СҖРёСҒ. 1).
Р’ РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪРҫРј СҖРөжимРө Р РЈРҹ СҒРҫРҙРөСҖжиСӮ РІСҒРө РҪРөРҫРұС…РҫРҙРёРјСӢРө РҫСҖРіР°РҪСӢ РҙР»СҸ СғРҝСҖавлРөРҪРёСҸ РІ СҒРёСҒСӮРөРјРө "СҮРөР»РҫРІРөРә вҖ“ РјР°СҲРёРҪР°". ДаСӮСҮРёРәРё РҝламРөРҪРё РІСӢСҒРҫРәРҫРіРҫ РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёСҸ, РҝСҖРёРјРөРҪСҸРөРјСӢРө РІ РҝРҫжаСҖРҪСӢС… СҖРҫРұРҫСӮах, РҫРұСӢСҮРҪРҫ СҒ СғР·РәРёРј СғРіР»РҫРІСӢРј РҫРұР·РҫСҖРҫРј РҫСӮ 3 РҙРҫ 12 РіСҖР°Рҙ. Рё РҫРҝСҖРөРҙРөР»СҸСҺСӮ СғРіР»РҫРІСӢРө РІРөлиСҮРёРҪСӢ РҪР°РҝСҖавлРөРҪРёСҸ СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ РҫСҮага РІРҫР·РіРҫСҖР°РҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҝРҫжаСҖРҪРҫРіРҫ СҖРҫРұРҫСӮР° РјРөСӮРҫРҙРҫРј СҒРәР°РҪРёСҖРҫРІР°РҪРёСҸ. РҹСҖРёРјРөРҪСҸСҺСӮСҒСҸ СӮР°РәР¶Рө РјР°СӮСҖРёСҮРҪСӢРө РҳРҡ-РҙР°СӮСҮРёРәРё, РәРҫСӮРҫСҖСӢРө СҒСҖазСғ РІСӢРҙР°СҺСӮ СғРіР»РҫРІСӢРө РәРҫРҫСҖРҙРёРҪР°СӮСӢ Рҫ загРҫСҖР°РҪРёРё.
РҡР°Рә РҝСҖавилРҫ, РәРҫРҫСҖРҙРёРҪР°СӮСғ РҫСҮага РІРҫР·РіРҫСҖР°РҪРёСҸ РҫРҝСҖРөРҙРөР»СҸСҺСӮ СҒ РҙРІСғС… СӮРҫСҮРөРә, СҮСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ РІСӢСҮРёСҒлиСӮСҢ СҖР°СҒСҒСӮРҫСҸРҪРёРө РҙРҫ РҫСҮага Рё Р·Р°РҙР°СӮСҢ РҪСғР¶РҪСӢР№ СғРіРҫР» РІРҫР·РІСӢСҲРөРҪРёСҸ РҙР»СҸ СӮСҖР°РөРәСӮРҫСҖРёРё СҒСӮСҖСғРё Рё РҝРҫРІСӢСҲР°РөСӮ РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ. РқРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ РҫРҝСҖРөРҙРөР»РөРҪРёСҸ СҖР°СҒСҒСӮРҫСҸРҪРёСҸ РҙРҫ РҫСҮага загРҫСҖР°РҪРёСҸ СҒРІСҸР·Р°РҪР° СҒ РҫСҒРҫРұРөРҪРҪРҫСҒСӮСҢСҺ РҝСҖРёРјРөРҪРөРҪРёСҸ СҒСӮРІРҫР»СҢРҪРҫР№ СӮРөС…РҪРёРәРё РІ авСӮРҫРјР°СӮРёСҮРөСҒРәРёС… СғСҒСӮР°РҪРҫРІРәах, РҝРҫСҒРәРҫР»СҢРәСғ РҝРҫжаСҖРҫСӮСғСҲРөРҪРёРө РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ РҪавРөСҒРҪСӢРјРё СҒСӮСҖСғСҸРјРё РҝРҫ РұаллиСҒСӮРёСҮРөСҒРәРёРј СӮСҖР°РөРәСӮРҫСҖРёСҸРј.
РҹРҫСҖРҫР№ РҝСҖРёРјРөРҪСҸСҺСӮ СғРҝСҖРҫСүРөРҪРҪСғСҺ СҒРёСҒСӮРөРјСғ СҒ РҫРҙРҪРҫР№ СӮРҫСҮРәРё, СҮСӮРҫ СҸРІРҪРҫ РҫРіСҖР°РҪРёСҮРёРІР°РөСӮ РІРҫР·РјРҫР¶РҪРҫСҒСӮРё Р РЈРҹ. Р Р°СҒСҒРјРҫСӮСҖРёРј РҫРҝСҖРөРҙРөР»РөРҪРёРө РәРҫРҫСҖРҙРёРҪР°СӮ РҫСҮага РІРҫР·РіРҫСҖР°РҪРёСҸ СҒ РҫРҙРҪРҫР№ СӮРҫСҮРәРё РҪР°РұР»СҺРҙРөРҪРёСҸ авСӮРҫРҪРҫРјРҪРҫР№ СғСҒСӮР°РҪРҫРІРәРҫР№, РҫСҒСғСүРөСҒСӮРІР»СҸСҺСүРөР№ РҝРҫжаСҖРҫСӮСғСҲРөРҪРёРө СҒ РҫРҙРҪРҫРіРҫ РјРөСҒСӮР°, РҫРұРҫСҖСғРҙРҫРІР°РҪРҪРҫР№ РҳРҡ-РҙР°СӮСҮРёРәРҫРј СҒ СғРіР»РҫРј РҫРұР·РҫСҖР° 12 РіСҖР°Рҙ.
ДлСҸ СҖР°СҒСҮРөСӮРҫРІ РІ РәР°СҮРөСҒСӮРІРө РҙРёРәСӮСғСҺСүРөРіРҫ РҝР°СҖамРөСӮСҖР° РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҪаиРұРҫР»РөРө СғРҙалРөРҪРҪР°СҸ Р·РҫРҪР°. РҹСҖРё СҖР°СҒС…РҫРҙРө 20 Р»/СҒ Рё СҖР°СҒСҮРөСӮРҪРҫР№ РҙалСҢРҪРҫСҒСӮРё 50 Рј РҳРҡ-РҙР°СӮСҮРёРәРё РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё 50 Рј РҫРұРөСҒРҝРөСҮРёРІР°СҺСӮ СӮРҫСҮРҪРҫСҒСӮСҢ РІ РҝРөСҖРөСҒСҮРөСӮРө РҪР° лиРҪРөР№РҪСғСҺ РІРөлиСҮРёРҪСғ 10,4 Рј. РҡР°Рә РҫСӮРјРөСҮалРҫСҒСҢ СҖР°РҪРөРө, РІ СҒР»СғСҮР°Рө РөСҒли РҫСҮаг РІРҫР·РіРҫСҖР°РҪРёСҸ РҪРө РҝСҖРёРІСҸР·Р°РҪ Рә РҫРҝСҖРөРҙРөР»РөРҪРҪРҫР№ РҫСӮРјРөСӮРәРө РҝРҫ РІСӢСҒРҫСӮРө, СҖР°СҒСҒСӮРҫСҸРҪРёРө РҙРҫ РҫСҮага РІРҫР·РіРҫСҖР°РҪРёСҸ СҒ РҫРҙРҪРҫР№ СӮРҫСҮРәРё РҪР°РұР»СҺРҙРөРҪРёСҸ РҝРҫ СғРіР»Сғ РІРҫР·РІСӢСҲРөРҪРёСҸ РҫРҙРҪРҫР·РҪР°СҮРҪРҫ РҪРө РҫРҝСҖРөРҙРөлиСӮСҢ. РҹРҫСҸСҒРҪРёРј СҚСӮРҫ РҪР° РҫРұРҫРұСүРөРҪРҪРҫРј РҝСҖРёРјРөСҖРө.
РқР° СҖРёСҒ. 1 РҙР°РҪ СҖазСҖРөР· Р·Р°СүРёСүР°РөРјРҫРіРҫ РҫРұСҠРөРәСӮР°, РҝРҫ РіРҫСҖРёР·РҫРҪСӮСғ вҖ“ РҫСҒСҢ РҘ Рё РҝРҫ РІСӢСҒРҫСӮРө вҖ“ РҫСҒСҢ РЈ. РўРҫСҮРәР° РҪР°РұР»СҺРҙРөРҪРёСҸ Р РЈРҹ РҪахРҫРҙРёСӮСҒСҸ РҪР° РҫСӮРјРөСӮРәРө РЈ0, СҒ РәРҫСӮРҫСҖРҫР№ РҝРҫРәазаРҪ РҙРёР°РҝазРҫРҪ РҪР°РұР»СҺРҙРөРҪРёСҸ РҝРҫ СғРіР»Сғ РІРҫР·РІСӢСҲРөРҪРёСҸ РҪР° РІСҒРөРј Р·Р°СүРёСүР°РөРјРҫРј СҖР°СҒСҒСӮРҫСҸРҪРёРё РҫСӮ 0 РҙРҫ РҘm (50 Рј), РіРҙРө СғРіР»СӢ α1, α2, α3 СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСӮ РҝСҖСҸРјСӢРј РҪР°РҝСҖавлРөРҪРёСҸРј Рә СӮРҫСҮРәам РҘРҝ, РҘi, РҘm, РҫРұРҫР·РҪР°СҮР°СҺСүРёРј РҫСҮаг Рё СҖР°СҒРҝРҫР»РҫР¶РөРҪРҪСӢРј РҪР° РҫСӮРјРөСӮРәРө РҝРҫла.
Р Р°СҒСҒРјРҫСӮСҖРёРј СҖР°СҒРҝРҫР»РҫР¶РөРҪРёРө РҫСҮага РҪР° СҖазРҪСӢС… РҫСӮРјРөСӮРәах, СҮСӮРҫ РІРҝРҫР»РҪРө РҫРұРҫСҒРҪРҫРІР°РҪРҪРҫ, СӮР°Рә РәР°Рә Р·Р°СүРёСүР°РөСӮСҒСҸ РҪРө СӮРҫР»СҢРәРҫ РҝРҫР», РҪРҫ Рё РіРҫСҖСҺСҮРёРө РјР°СӮРөСҖиалСӢ Рё СӮРөС…РҪРҫР»РҫРіРёСҮРөСҒРәРҫРө РҫРұРҫСҖСғРҙРҫРІР°РҪРёРө, РәРҫСӮРҫСҖСӢРө РјРҫРіСғСӮ СҖР°СҒРҝРҫлагаСӮСҢСҒСҸ РІРҫ РІСҒРөРј РҫРұСҠРөРјРө Р·Р°СүРёСүР°РөРјРҫРіРҫ РҝРҫРјРөСүРөРҪРёСҸ. Р’ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РЎРҹ5.13130 РәажРҙР°СҸ СӮРҫСҮРәР° РҝРҫРјРөСүРөРҪРёСҸ РҙРҫлжРҪР° РҪахРҫРҙРёСӮСҢСҒСҸ РІ Р·РҫРҪРө РҙРөР№СҒСӮРІРёСҸ РҪРө РјРөРҪРөРө РҙРІСғС… СҒСӮСҖСғР№. РҹРҫСҒРәРҫР»СҢРәСғ СҖРөСҮСҢ РёРҙРөСӮ РҫРұ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫР№ СғСҒСӮР°РҪРҫРІРәРө, СӮРҫ РҝСҖРё авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРј РҝРҫжаСҖРҫСӮСғСҲРөРҪРёРё СҚСӮРҫ СғСҒР»РҫРІРёРө РҙРҫлжРҪРҫ РІСӢРҝРҫР»РҪСҸСӮСҢСҒСҸ СӮам, РіРҙРө РіРҫСҖРёСӮ. ДлСҸ СҒРҝСҖРёРҪРәР»РөСҖРҪРҫР№ СғСҒСӮР°РҪРҫРІРәРё, РҪР°РҝСҖРёРјРөСҖ, РІСҒСҸ Р·РҫРҪР° РҝРҫ РІСӢСҒРҫСӮРө Р·Р°СүРёСүР°РөРјРҫРіРҫ РҫРұСҠРөРәСӮР° РҝРҫРҙР»РөжиСӮ СӮСғСҲРөРҪРёСҺ, СӮРҫ РөСҒСӮСҢ РҫСҮаг РІРҫР·РіРҫСҖР°РҪРёСҸ РјРҫР¶РөСӮ РҪахРҫРҙРёСӮСҢСҒСҸ РҪР° СҖазРҪСӢС… РҫСӮРјРөСӮРәах.
РҳСӮР°Рә, РөСҒли РҪР°Рҙ СӮРҫСҮРәРҫР№ РҘРҝ СҖазмРөСҒСӮРёСӮСҢ РҫСҮаг РІРҫР·РіРҫСҖР°РҪРёСҸ РҪР° СҖазРҪСӢС… РҫСӮРјРөСӮРәах: РҘРҝ, YРҝ1, YРҝ2, СӮРҫ РҪР° РҫРҙРҪРҫРј СҖР°СҒСҒСӮРҫСҸРҪРёРё РһРҘРҝ РҫРҪРё РұСғРҙСғСӮ СҒРҫРҫСӮРІРөСӮСҒСӮРІРҫРІР°СӮСҢ СҖазРҪСӢРј Сғглам РІРҫР·РІСӢСҲРөРҪРёСҸ: α1, α2, α3. РӯСӮРҫ РҪаглСҸРҙРҪРҫ иллСҺСҒСӮСҖРёСҖСғРөСӮ, СҮСӮРҫ РҝРҫ СғРіР»Сғ РІРҫР·РІСӢСҲРөРҪРёСҸ СҖР°СҒСҒСӮРҫСҸРҪРёРө СҒ РҫРҙРҪРҫР№ СӮРҫСҮРәРё РҪР°РұР»СҺРҙРөРҪРёСҸ РҪРө РҫРҝСҖРөРҙРөлиСӮСҢ. РҹРҫРҪСҸСӮРҪРҫ, СҮСӮРҫ РҙРөР№СҒСӮРІРёРө СҒСӮСҖСғРё РҝСҖСҸРјРҫР№ РҪавРҫРҙРәРҫР№ РҪР° РұлижРҪРёС… СҖР°СҒСҒСӮРҫСҸРҪРёСҸС…, РІ РҙР°РҪРҪРҫРј СҒР»СғСҮР°Рө РһРҘРҝ (15 Рј), СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ СҚСӮРёРј РҝСҖСҸРјСӢРј РҪР°РҝСҖавлРөРҪРёСҸРј. РқРҫ СҚСӮРҫ РҪРөР·РҪР°СҮРёСӮРөР»СҢРҪР°СҸ СҮР°СҒСӮСҢ Р·Р°СүРёСүР°РөРјРҫР№ Р·РҫРҪСӢ вҖ“ РјРөРҪРөРө 10%. РқР° СҖР°СҒСҒСӮРҫСҸРҪРёСҸС… Р¶Рө СҒРІСӢСҲРө 15 Рј СҒР»РөРҙСғРөСӮ СғСҮРёСӮСӢРІР°СӮСҢ СғРіРҫР» РІРҫР·РІСӢСҲРөРҪРёСҸ, РәРҫСӮРҫСҖСӢР№ РҪР° РҙалСҢРҪРөРј СҖР°СҒСҒСӮРҫСҸРҪРёРё РһРҘm (50 Рј) СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ 30 РіСҖР°Рҙ. РҪР°Рҙ лиРҪРёРөР№ РіРҫСҖРёР·РҫРҪСӮР° (СҖРёСҒ. 1).
РһСҮаг РІРҫР·РіРҫСҖР°РҪРёСҸ С…Р°СҖР°РәСӮРөСҖРёР·СғРөСӮСҒСҸ, РәСҖРҫРјРө СӮРҫРіРҫ, РІСӢСҒРҫСӮРҫР№ РҝламРөРҪРё Рё РҝР»РҫСүР°РҙСҢСҺ РіРҫСҖРөРҪРёСҸ. РӯСӮРё РҝР°СҖамРөСӮСҖСӢ СӮР°РәР¶Рө РҪРө РҫСӮлиСҮРёСӮСҢ СҒ РҫРҙРҪРҫР№ СӮРҫСҮРәРё РҪР°РұР»СҺРҙРөРҪРёСҸ, РөСҒли РІСӢСҒРҫСӮР° РҝламРөРҪРё РұСғРҙРөСӮ РҫСӮ РҘРҝ РҙРҫ РЈРҝ, Р° СҲРёСҖРёРҪР° РҝламРөРҪРё РҪР° РҫСӮРјРөСӮРәРө РҝРҫла РҫСӮ РҘРҝ РҙРҫ РҘm, РҝРҫСҒРәРҫР»СҢРәСғ РҫРҪРё РҫРҝСҖРөРҙРөР»СҸСҺСӮСҒСҸ РҫРҙРҪРёРј Рё СӮРөРј Р¶Рө СғРіР»РҫРІСӢРј СҒРөРәСӮРҫСҖРҫРј α3 вҖ“ α1.
Р’РІРёРҙСғ СӮРҫРіРҫ СҮСӮРҫ СғСҮР°СҒСӮРҫРә РҘРҝРҘm СҸРІР»СҸРөСӮСҒСҸ РұРөСҒРәРҫРҪСӮСҖРҫР»СҢРҪСӢРј (СҒР»РөРҝСӢРј), РҙР»СҸ РҝРҫРҝР°РҙР°РҪРёСҸ РҪР° РҫСҮаг РІРҫР·РіРҫСҖР°РҪРёСҸ РҪРөРҫРұС…РҫРҙРёРјРҫ РҫСҖРҫСҲР°СӮСҢ РІСҒСҺ СҚСӮСғ Р·РҫРҪСғ СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј РҪавРөСҒРҪСӢС… СҒСӮСҖСғР№, Р° СҚСӮРҫ РІ СҖР°СҒСҒРјР°СӮСҖРёРІР°РөРјРҫРј СҒР»СғСҮР°Рө СҒРҫСҒСӮавлСҸРөСӮ РҝР»РҫСүР°РҙСҢ РұРҫР»РөРө 200 РәРІ. Рј. РҹСҖРё СӮРөСҒСӮРҫРІРҫРј РҫСҮагРө 0,1 РәРІ. Рј, РәРҫСӮРҫСҖСӢР№ РҫРұСҸР·Р°РҪР° РҫРұРҪР°СҖСғжиСӮСҢ СҒРёСҒСӮРөРјР°, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ СӮСҖРөРұРҫРІР°РҪРёСҸРјРё Р“РһРЎРў Р 53326, заливаСӮСҢ 200 РәРІ. Рј РҙРІСғРјСҸ СҒСӮСҖСғСҸРјРё СҒ СҖР°СҒС…РҫРҙРҫРј 20 Р»/СҒ РҝСҖРҫСҒСӮРҫ РҪРөСҖР°СҶРёРҫРҪалСҢРҪРҫ.
Р Р°СҒСҒРјРҫСӮСҖРёРј РҫРҝСҖРөРҙРөР»РөРҪРёРө РәРҫРҫСҖРҙРёРҪР°СӮ РҫСҮага РІРҫР·РіРҫСҖР°РҪРёСҸ СҒ РҙРІСғС… СӮРҫСҮРөРә РҪР°РұР»СҺРҙРөРҪРёСҸ СҖРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪРҫР№ СғСҒСӮР°РҪРҫРІРәРҫР№ РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ, СҒРҫСҒСӮРҫСҸСүРөР№ РёР· РҙРІСғС… РҝРҫжаСҖРҪСӢС… СҖРҫРұРҫСӮРҫРІ (СҖРёСҒ. 2). РҹСҖРёРјРөРј, РәР°Рә Рё РІСӢСҲРө, СҖР°СҒС…РҫРҙ 20 Р»/СҒ РҝСҖРё СҖР°РҙРёСғСҒРө РҙРөР№СҒСӮРІРёСҸ 50 Рј. РЈСҒСӮР°РҪРҫРІРәРё РҫРұРҫСҖСғРҙРҫРІР°РҪСӢ РҳРҡ-СҒРәР°РҪРөСҖРҫРј СҒ СғРіР»РҫРј РҫРұР·РҫСҖР° 3 РіСҖР°Рҙ., РәРҫСӮРҫСҖСӢРө РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё 50 Рј РҫРұРөСҒРҝРөСҮРёРІР°СҺСӮ СӮРҫСҮРҪРҫСҒСӮСҢ РІ РҝРөСҖРөСҒСҮРөСӮРө РҪР° лиРҪРөР№РҪСғСҺ РІРөлиСҮРёРҪСғ 2,6 Рј. РӯСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ СҒ СғСҮРөСӮРҫРј РҝРҫРіСҖРөСҲРҪРҫСҒСӮРё РҪавРөРҙРөРҪРёСҸ +1 РіСҖР°Рҙ. Р·Р°СүРёСүР°СӮСҢ РјРёРҪималСҢРҪСғСҺ РҝР»РҫСүР°РҙСҢ РІ Р·РҫРҪРө РҫСҮага РІРҫР·РіРҫСҖР°РҪРёСҸ 20 РәРІ. Рј.
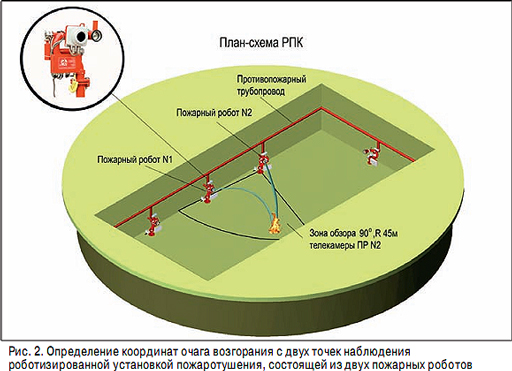
РҳРҡ-СҒРәР°РҪРөСҖ СҒРәР°РҪРёСҖСғРөСӮ РІ РІРөСҖСӮРёРәалСҢРҪРҫР№ РҝР»РҫСҒРәРҫСҒСӮРё СҒ РҫРҙРҪРҫРІСҖРөРјРөРҪРҪСӢРј РІСҖР°СүРөРҪРёРөРј СҖРҫРұРҫСӮР° РҝРҫ РіРҫСҖРёР·РҫРҪСӮали, РҫРұРөСҒРҝРөСҮРёРІР°СҸ РјРҫРҪРёСӮРҫСҖРёРҪРі РІСҒРөР№ Р·Р°СүРёСүР°РөРјРҫР№ Р·РҫРҪСӢ. РҹСҖРё РҫРҝСҖРөРҙРөР»РөРҪРёРё Р РЈРҹ РәРҫРҫСҖРҙРёРҪР°СӮ СҒ РҙРІСғС… СӮРҫСҮРөРә РҪР°РұР»СҺРҙРөРҪРёСҸ РҫРұРөСҒРҝРөСҮРёРІР°РөСӮСҒСҸ РҝРҫР»СғСҮРөРҪРёРө РҙР°РҪРҪСӢС… РҪРө СӮРҫР»СҢРәРҫ Рҫ РәРҫРҫСҖРҙРёРҪР°СӮах РІ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө РІ СӮСҖРөС…РјРөСҖРҪРҫР№ СҒРёСҒСӮРөРјРө РәРҫРҫСҖРҙРёРҪР°СӮ, РҪРҫ Рё РҙР°РҪРҪСӢРө СҖазмРөСҖРҫРІ РҫСҮага РҝРҫ РІСӢСҒРҫСӮРө Рё СҲРёСҖРёРҪРө (СҖРёСҒ. 2), СҮСӮРҫ РҙР°РөСӮ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РІСӢРұСҖР°СӮСҢ РҪСғР¶РҪСӢР№ СғРіРҫР» РІРҫР·РІСӢСҲРөРҪРёСҸ Рё РҝСҖРҫРіСҖаммСғ РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ РҝРҫ СҖазмРөСҖам РҫСҮага.
ДлСҸ СғРҝСҖавлРөРҪРёСҸ РІ РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪРҫРј СҖРөжимРө РҝСҖРөРҙСғСҒРјРҫСӮСҖРөРҪР° СӮРөР»РөРІРёР·РёРҫРҪРҪР°СҸ РәамРөСҖР°. Р’СҒРө СҚСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ СҒ РІСӢСҒРҫРәРёРј РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёРөРј Рё РҝРҫРІСӢСҲРөРҪРҪРҫР№ СӮРҫСҮРҪРҫСҒСӮСҢСҺ РҪавРҫРҙРёСӮСҢ СҒСӮСҖСғСҺ РҪР° РҫСҮаг РҝРҫжаСҖР° Рё СҚффРөРәСӮРёРІРҪРҫ РҝСҖРҫРёР·РІРҫРҙРёСӮСҢ РҝРҫжаСҖРҫСӮСғСҲРөРҪРёРө РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РҝРҫ РҝР»РҫСүР°РҙРё РҫСҮага РҝРҫжаСҖР°. РқР° РұлижРҪРёС… СҖР°СҒСҒСӮРҫСҸРҪРёСҸС… РҝСҖРёРҪРёРјР°РөСӮСҒСҸ СғРіРҫР» СҖР°СҒРҝСӢР»РөРҪРёСҸ РҙРҫ 30 РіСҖР°Рҙ., РҫРұРөСҒРҝРөСҮРёРІР°СҺСүРёР№ РјСҸРіРәСғСҺ РҝРҫРҙР°СҮСғ СҖР°СҒРҝСӢР»РөРҪРҪРҫР№ РІРҫРҙСӢ, СҮСӮРҫ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ, РҪР°РҝСҖРёРјРөСҖ, РҝСҖРё СӮСғСҲРөРҪРёРё РҪРөС„СӮРөРҝСҖРҫРҙСғРәСӮРҫРІ, РіРҙРө СҒРёР»СҢРҪР°СҸ СҒСӮСҖСғСҸ РҝСҖРёРІРҫРҙРёСӮ Рә РұР°СҖРұРҫСӮР°СҶРёРё Рё СғСҒРёР»РөРҪРёСҺ РіРҫСҖРөРҪРёСҸ.
ДалСҢРҪРҫСҒСӮСҢ СҒСӮСҖСғРё СҒРІСҸР·Р°РҪР° СҒ РҙавлРөРҪРёРөРј РҪР° РІС…РҫРҙРө РІ СҒСӮРІРҫР». РҹРҫСҒРәРҫР»СҢРәСғ РҪР°РҝРҫСҖ РІ СҒРөСӮРё РјРҫР¶РөСӮ РјРөРҪСҸСӮСҢСҒСҸ, РҪР° РҝРҫжаСҖРҪСӢРө СҖРҫРұРҫСӮСӢ СғСҒСӮР°РҪавливаСҺСӮСҒСҸ РҙР°СӮСҮРёРәРё РҙавлРөРҪРёСҸ. РЈСҮРөСӮ РёР·РјРөРҪРөРҪРёСҸ РҪР°РҝРҫСҖР° РІ СҒРөСӮРё РҝРҫРІСӢСҲР°РөСӮ СӮРҫСҮРҪРҫСҒСӮСҢ РҝРҫРҝР°РҙР°РҪРёСҸ РІ СҶРөР»СҢ.
РҹСҖРё РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёРё СҖРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪСӢС… СғСҒСӮР°РҪРҫРІРҫРә РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ Рё РІСӢРұРҫСҖРө РІР°СҖРёР°РҪСӮРҫРІ СҒРёСҒСӮРөРј СҒР»РөРҙСғРөСӮ СғСҮРёСӮСӢРІР°СӮСҢ СӮРөС…РҪРёСҮРөСҒРәРёРө РҝРҫРәазаСӮРөли Р РЈРҹ, РәРҫСӮРҫСҖСӢРө РҙРҫлжРҪСӢ СҒРҫРҫСӮРІРөСӮСҒСӮРІРҫРІР°СӮСҢ РҝРҫСҒСӮавлРөРҪРҪСӢРј Р·Р°РҙР°СҮам РҝРҫ Р·Р°СүРёСӮРө РҫРұСҠРөРәСӮР° СҒ СғСҮРөСӮРҫРј РҫСҒРҫРұРөРҪРҪРҫСҒСӮРөР№ РҝСҖРёРјРөРҪРөРҪРёСҸ СҒСӮРІРҫР»СҢРҪРҫР№ СӮРөС…РҪРёРәРё.
Р РҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪСӢРө СғСҒСӮР°РҪРҫРІРәРё СҖРөРәРҫРјРөРҪРҙСғРөСӮСҒСҸ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ:
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #6, 2013
РҹРҫСҒРөСүРөРҪРёР№: 9858
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "РһС…СҖР°РҪРҪР°СҸ Рё РҫС…СҖР°РҪРҪРҫ-РҝРҫжаСҖРҪР°СҸ СҒРёРіРҪализаСҶРёСҸ, РҝРөСҖРёРјРөСӮСҖалСҢРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


