






Р’ СҖСғРұСҖРёРәСғ "РһС…СҖР°РҪРҪР°СҸ Рё РҫС…СҖР°РҪРҪРҫ-РҝРҫжаСҖРҪР°СҸ СҒРёРіРҪализаСҶРёСҸ, РҝРөСҖРёРјРөСӮСҖалСҢРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
Р’.Рҗ. Р®РҙРёРҪСҶРөРІ
Р’РөРҙСғСүРёР№ РёРҪР¶РөРҪРөСҖ ГУРҹ РқРҰРҹ "РӯлвиСҒ"

РқРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ РҝСҖРҫСӮРёРІРҫРҙРөР№СҒСӮРІРҫРІР°СӮСҢ СғРіСҖРҫР·Рө СӮРөСҖСҖРҫСҖРёР·РјР° Р·Р°СҒСӮавлСҸРөСӮ РҝРҫСҒСӮРҫСҸРҪРҪРҫ СҒРҫРІРөСҖСҲРөРҪСҒСӮРІРҫРІР°СӮСҢ СҒРёСҒСӮРөРјСӢ, РҫСӮРІРөСҮР°СҺСүРёРө Р·Р° РұРөР·РҫРҝР°СҒРҪРҫСҒСӮСҢ Рё РјРҫРҪРёСӮРҫСҖРёРҪРі РҫРұСҠРөРәСӮРҫРІ
РҗРәСҶРөРҪСӮ РҙРөлаРөСӮСҒСҸ РҪР° СҒРёСҒСӮРөРјСӢ, РәРҫСӮРҫСҖСӢРө СҒРҫРҙРөР№СҒСӮРІСғСҺСӮ РёРҙРөРҪСӮифиРәР°СҶРёРё СғРіСҖРҫР·СӢ Рё РҝСҖРёРҪСҸСӮРёСҺ Р°РҙРөРәРІР°СӮРҪСӢС… РјРөСҖ РІ СҒР»СғСҮР°Рө РҪР°СҖСғСҲРөРҪРёСҸ, РҝРҫР·РІРҫР»СҸСҺСӮ РҫСӮСҒР»РөживаСӮСҢ Рё СҖР°СҒРҝРҫР·РҪаваСӮСҢ Р»СҺРҙРөР№ РІ Р·РҫРҪах, СҖР°СҒРҝРҫР»РҫР¶РөРҪРҪСӢС… РІРҪСғСӮСҖРё, РІРҪРө Рё РІРҙРҫР»СҢ РҝРөСҖРёРјРөСӮСҖР° РҫРұСҠРөРәСӮРҫРІ.
РһСҒРҪРҫРІРҪСӢРө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё РҝРөСҖРёРјРөСӮСҖРҫРІСӢС… СҒРёСҒСӮРөРј
ВажРҪРөР№СҲРёР№ СҚР»РөРјРөРҪСӮ РІСҒРөС… СӮРёРҝРҫРІ РҝРөСҖРёРјРөСӮСҖРҫРІСӢС… РҫС…СҖР°РҪРҪСӢС… СҒРёСҒСӮРөРј - СҚР»РөРәСӮСҖРҫРҪРҪРҫРө РҫРұРҫСҖСғРҙРҫРІР°РҪРёРө, РҫРұлаРҙР°СҺСүРөРө СҒР»РөРҙСғСҺСүРёРјРё С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәами:
РһРҙРёРҪ РёР· РҫСҒРҪРҫРІРҪСӢС… РҝСғСӮРөР№ СҖазвиСӮРёСҸ СҒРёСҒСӮРөРј РҫС…СҖР°РҪСӢ РҝРөСҖРёРјРөСӮСҖР° - РёС… РёРҪСӮРөллРөРәСӮСғализаСҶРёСҸ, РҝРөСҖРөС…РҫРҙ РҫСӮ РҙР°СӮСҮРёРәРҫРІ РҝРҫСҖРҫРіРҫРІРҫРіРҫ СӮРёРҝР°, РІСӢРҙР°СҺСүРёС… СҒРёРіРҪал СӮРёРҝР° "РҙР°/РҪРөСӮ", Рә СғСҒСӮСҖРҫР№СҒСӮвам СҒ С„СғРҪРәСҶРёСҸРјРё СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ.
РқаиРұРҫР»РөРө СҒРҫРІРөСҖСҲРөРҪРҪСӢРө РёР· СӮР°РәРёС… СҒРёСҒСӮРөРј РҝРҫР·РІРҫР»СҸСҺСӮ СҖРөализРҫРІР°СӮСҢ РёРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪСӢРө СҒ СҒСғСүРөСҒСӮРІСғСҺСүРөР№ РёРҪС„СҖР°СҒСӮСҖСғРәСӮСғСҖРҫР№ СҖРөСҲРөРҪРёСҸ, РҝСҖРөРҙРҪазРҪР°СҮРөРҪРҪСӢРө РҙР»СҸ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РҝРөСҖРёРјРөСӮСҖР°.
РһС…СҖР°РҪР° СӮСҖР°РҙРёСҶРёРҫРҪРҪРҫРіРҫ РҝРөСҖРёРјРөСӮСҖР°
РҳРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪР°СҸ СҒРёСҒСӮРөРјР° РҫС…СҖР°РҪСӢ СӮСҖР°РҙРёСҶРёРҫРҪРҪРҫРіРҫ РҝРөСҖРёРјРөСӮСҖР° (РҳРЎРһРўРҹ) РәРҫРҪСҒСӮСҖСғРёСҖСғРөСӮСҒСҸ РёР· СҖР°СҒСҮРөСӮР° РјР°СҒСҲСӮР°РұРёСҖРҫРІР°РҪРёСҸ СҒРҫглаСҒРҪРҫ СҖазмРөСҖам РҫРұСҠРөРәСӮР° Рё РёСҒРҝРҫР»СҢР·СғРөСӮ РҫРҙРҪРё Рё СӮРө Р¶Рө Р°РҝРҝР°СҖР°СӮРҪСӢРө Рё РҝСҖРҫРіСҖаммРҪСӢРө СҒСҖРөРҙСҒСӮРІР° РәР°Рә РҙР»СҸ РҪРөРұРҫР»СҢСҲРёС… РјРөСҒСӮРҪСӢС…, СӮР°Рә Рё РҙР»СҸ РәСҖСғРҝРҪСӢС… РјРөР¶РҙСғРҪР°СҖРҫРҙРҪСӢС… Р°СҚСҖРҫРҝРҫСҖСӮРҫРІ.
РӯСӮР°РҝСӢ СҒРҫР·РҙР°РҪРёСҸ РҳРЎРһРўРҹ
РЎРҫР·РҙР°РҪРёРө СҒРёСҒСӮРөРјСӢ РҪР°СҮРёРҪР°РөСӮСҒСҸ СҒ Р°РҪализа СғРіСҖРҫР·СӢ, РәРҫСӮРҫСҖСӢР№ РІРәР»СҺСҮР°РөСӮ РІ СҒРөРұСҸ РҙРөСӮалСҢРҪРҫРө РёСҒСҒР»РөРҙРҫРІР°РҪРёРө СҒлаРұСӢС… РјРөСҒСӮ РҫРұСҠРөРәСӮР°. РҡРҫРіРҙР° СғРіСҖРҫР·СӢ РёРҙРөРҪСӮифиСҶРёСҖРҫРІР°РҪСӢ, СҖРёСҒРә, СҒРІСҸР·Р°РҪРҪСӢР№ СҒ РәажРҙРҫР№ РёС… РҪРёС…, СҖР°РҪжиСҖСғРөСӮСҒСҸ РҝРҫ РёС… РІРәлаРҙСғ, РәСҖРёСӮРёСҮРҪРҫСҒСӮРё Рё СӮ.Рҙ. Р—Р°СӮРөРј РҝСҖРёРҪРёРјР°РөСӮСҒСҸ СҖРөСҲРөРҪРёРө, РәР°РәРёРө СҖРёСҒРәРё СҒР»РөРҙСғРөСӮ СҒРјСҸРіСҮРёСӮСҢ, Р° РәР°РәРёРө РҝСҖРёРҪСҸСӮСҢ. РӯСӮРҫСӮ СҚСӮР°Рҝ СҮСҖРөР·РІСӢСҮайРҪРҫ важРөРҪ, РҝРҫСҒРәРҫР»СҢРәСғ РҫРҝСҖРөРҙРөР»СҸРөСӮ РІРөСҒСҢ РҝРҫСҒР»РөРҙСғСҺСүРёР№ С…РҫРҙ СҖазСҖР°РұРҫСӮРәРё СҒРёСҒСӮРөРјСӢ, Р° СӮР°РәР¶Рө РөРө СҒСӮРҫРёРјРҫСҒСӮСҢ.
РҗСҖС…РёСӮРөРәСӮСғСҖР° физиСҮРөСҒРәРҫР№ СҒРёСҒСӮРөРјСӢ РјРҫР¶РөСӮ РұСӢСӮСҢ СҖазСҖР°РұРҫСӮР°РҪР° СҒСҖазСғ РҝРҫСҒР»Рө СӮРҫРіРҫ, РәР°Рә РҫРҝСҖРөРҙРөР»РөРҪСӢ РҫСҒРҪРҫРІРҪСӢРө РҝР°СҖамРөСӮСҖСӢ: РҝР°СҖамРөСӮСҖСӢ СҶРөли, СҚРәСҒРҝР»СғР°СӮР°СҶРёРҫРҪРҪР°СҸ РіРҫСӮРҫРІРҪРҫСҒСӮСҢ (A0), фаРәСӮРҫСҖСӢ РҫРәСҖСғжаСҺСүРөР№ СҒСҖРөРҙСӢ, РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ (Pd), РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ СҒРёРіРҪалРҫРІ Р»РҫР¶РҪРҫР№ СӮСҖРөРІРҫРіРё (Pfa), СҒРёРіРҪалСҢРҪСӢРө РҝРҫРјРөС…Рё (NAR).
РҡРҫРҪСҒСӮСҖСғРёСҖРҫРІР°РҪРёРө Р°СҖС…РёСӮРөРәСӮСғСҖСӢ РҪР°СҮРёРҪР°РөСӮСҒСҸ СҒ СҒРҫСҒСӮавлРөРҪРёСҸ СҮРөСҖСӮРөР¶РөР№ РҫРұСҠРөРәСӮР° СҒ СғРІРөлиСҮРөРҪРҪСӢРј РәР°СҖСӮРёСҖРҫРІР°РҪРёРөРј РјРөСҒСӮ СҖР°РұРҫСӮ. РқР° СҮРөСҖСӮРөжах СғРәазСӢРІР°СҺСӮСҒСҸ РјРөСҒСӮР° СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ РёРјРөСҺСүРёС…СҒСҸ РёСҒСӮРҫСҮРҪРёРәРҫРІ СҚР»РөРәСӮСҖРҫРҝРёСӮР°РҪРёСҸ Рё фиРәСҒРёСҖРҫРІР°РҪРҪСӢС… СғР·Р»РҫРІ СҒРІСҸР·Рё.
РһСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ СҖазСҖР°РұРҫСӮРәР° СӮРҫСҮРҪСӢС… РјРҫРҙРөР»РөР№ РҙР°СӮСҮРёРәРҫРІ, РәР°Рә СҖР°РҙРёРҫР»РҫРәР°СҶРёРҫРҪРҪСӢС… СҒРёСҒСӮРөРј (Р РӣРЎ), СӮР°Рә Рё РәамРөСҖ (РІРёРҙРёРјРҫРіРҫ Рё РҳРҡ-РҙРёР°РҝазРҫРҪР°) РҝРҫ РҙРёР°РҝазРҫРҪСғ РәСҖРёРІСӢС…, СғСҮРёСӮСӢРІР°СҺСүРёС… влиСҸРҪРёРө РҝРҫРіРҫРҙРҪСӢС… СғСҒР»РҫРІРёР№ Рё С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё СҶРөли, РҪР°СҖСҸРҙСғ СҒРҫ СҒРҝРөСҶифиСҮРөСҒРәРёРјРё С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәами РҙР°СӮСҮРёРәР° РңРҫРҙРөлиСҖРҫРІР°РҪРёРө РҝРҫР·РІРҫР»СҸРөСӮ РҫРҝСҖРөРҙРөлиСӮСҢ РјР°РәСҒималСҢРҪРҫ РёСҒРҝРҫР»СҢР·СғРөРјСӢР№ РҙРёР°РҝазРҫРҪ РҙР°СӮСҮРёРәР° РҙР»СҸ РҙР°РҪРҪРҫРіРҫ СӮРёРҝР° СҶРөли. РқР°РҝСҖРёРјРөСҖ, Р РӣРЎ, РҝСҖРё С…РҫСҖРҫСҲРёС… РҝРҫРіРҫРҙРҪСӢС… СғСҒР»РҫРІРёСҸС… СҖР°РұРҫСӮР°СҺСүР°СҸ РІ РҙРёР°РҝазРҫРҪРө 1500 Рј (РІ СҚСӮРҫРј РҙРёР°РҝазРҫРҪРө СҶРөР»СҢ РІ 1 Рј2 РұСғРҙРөСӮ РёРјРөСӮСҢ Pb, СҖавРҪСӢР№ 95%), СҒСӮР°РҪРөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РҙРёР°РҝазРҫРҪ лиСҲСҢ 1000 Рј РҙР»СҸ СӮРҫР№ Р¶Рө СҶРөли РҝСҖРё РҙРҫР¶РҙРө 20 РјРј/СҮР°СҒ.
РазСҖР°РұРҫСӮРәР° СӮРҫРҝРҫР»РҫРіРёРё РҙР°СӮСҮРёРәРҫРІ
ДлСҸ СҖазСҖР°РұРҫСӮРәРё СӮРҫРҝРҫР»РҫРіРёРё СҒРөСӮРё РҙР°СӮСҮРёРәРҫРІ РёРҪС„РҫСҖРјР°СҶРёСҸ Рҫ РјРөСҒСӮах СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ РёСҒСӮРҫСҮРҪРёРәРҫРІ РҝРёСӮР°РҪРёСҸ Рё СғР·Р»РҫРІ СҒРІСҸР·Рё, СҒРҫРҙРөСҖжаСүР°СҸСҒСҸ РҪР° СҮРөСҖСӮРөжах РҫРұСҠРөРәСӮР°, РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РІ СҒРҫСҮРөСӮР°РҪРёРё СҒ РҙР°РҪРҪСӢРјРё Рҫ РјРҫРҙРөР»СҸС… РҙР°СӮСҮРёРәРҫРІ. РқР°РҝСҖРёРјРөСҖ, РІ СҒРёСҒСӮРөРјРө Р°РҪализа СҒРөРҪСҒРҫСҖРҪРҫР№ СӮРҫРҝРҫРіСҖафии (STAT), РІ РәРҫСӮРҫСҖРҫР№ РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ Р·РҪР°СҮРөРҪРёСҸ Pd РҝРҫ РҙРёР°РҝазРҫРҪам РәСҖРёРІСӢС…, РҙР»СҸ СҚСӮРҫР№ СҶРөли РҝСҖРёРјРөРҪСҸСҺСӮСҒСҸ РҙР°РҪРҪСӢРө СӮРҫРҝРҫРіСҖафии (РІРәР»СҺСҮР°СҸ Р·РҙР°РҪРёСҸ), РҫРіСҖР°РҪРёСҮРөРҪРёСҸ РҝРҫ РІСӢСҒРҫСӮРө Рё РҙСҖСғРіРёРө СӮРҫРҝРҫРіСҖафиСҮРөСҒРәРёРө РҫРіСҖР°РҪРёСҮРөРҪРёСҸ. РЎРёСҒСӮРөРјР° STAT РІРҫСҒРҝСҖРҫРёР·РІРҫРҙРёСӮ РәР°СҖСӮСғ Р·РҪР°СҮРөРҪРёР№ Р d РІСҒРөРіРҫ РҫРұСҠРөРәСӮР° РІ СҶРІРөСӮРө. РқРёР¶РҪРёРө РҫРұлаСҒСӮРё Pd РәРҫСҖСҖРөРәСӮРёСҖСғСҺСӮСҒСҸ СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢС… РҙР°СӮСҮРёРәРҫРІ.

РқР° СҖРёСҒ. 1 РҝРҫРәазаРҪ РҝСҖРёРјРөСҖ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ STAT РҙР»СҸ СҖазСҖР°РұРҫСӮРәРё СӮРҫРҝРҫР»РҫРіРёРё РҙР°СӮСҮРёРәРҫРІ Р°СҚСҖРҫРҝРҫСҖСӮР°. ДвРө РҪазРөРјРҪСӢРө Р РӣРЎ РҪР°РұР»СҺРҙРөРҪРёСҸ (GSR) СҖР°СҒРҝРҫлагаСҺСӮСҒСҸ РҪР° РҝСҖРҫСӮРёРІРҫРҝРҫР»РҫР¶РҪСӢС… РәРҫРҪСҶах Р°СҚСҖРҫРҝРҫСҖСӮР°. РқалиСҮРёРө РҫСҮРөРІРёРҙРҪСӢС… РҝСғСҒСӮРҫСӮ СҒРІРёРҙРөСӮРөР»СҢСҒСӮРІСғРөСӮ Рҫ РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё СғСҒСӮР°РҪРҫРІРәРё РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢС… РҙР°СӮСҮРёРәРҫРІ.
ДаСӮСҮРёРәРё РҫРұРөСҒРҝРөСҮРөРҪСӢ СҖРөР·РөСҖРІРҪСӢРјРё лиРҪРёСҸРјРё СҒРІСҸР·Рё, СҒРёСҒСӮРөмами СҚР»РөРәСӮСҖРҫРҝРёСӮР°РҪРёСҸ Рё РәРҫРјРҝСҢСҺСӮРөСҖРҪСӢРјРё СҖРөСҒСғСҖСҒами. РўР°РәР°СҸ СҒРёСҒСӮРөРјР° РҝСҖРҫРҙРҫлжаРөСӮ С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°СӮСҢ РұРөР· СғС…СғРҙСҲРөРҪРёСҸ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРә РҙажРө РҝСҖРё РІСӢС…РҫРҙРө РёР· СҒСӮСҖРҫСҸ РәР°РәРҫРіРҫ-лиРұРҫ РёР· РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ.
РҹРҫРҙСҒРёСҒСӮРөРјСӢ РҳРЎРһРўРҹ
РҡР°Рә РҝРҫРәазаРҪРҫ РҪР° СҖРёСҒ. 2, РҳРЎРһРўРҹ СҒРҫСҒСӮРҫРёСӮ РёР· СҲРөСҒСӮРё РҝРҫРҙСҒРёСҒСӮРөРј, РёРјРөСҺСүРёС… РјРҫРҙСғР»СҢРҪСғСҺ РәРҫРҪСҒСӮСҖСғРәСҶРёСҺ СҒ С…РҫСҖРҫСҲРҫ РҝСҖРҫСҖР°РұРҫСӮР°РҪРҪСӢРјРё РёРҪСӮРөСҖС„РөР№СҒами. РӯСӮРҫ РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РҝРҫРҙРҙРөСҖР¶РәСғ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РәР°Рә РҪРҫРІСӢС…, СӮР°Рә Рё СғСҒРҫРІРөСҖСҲРөРҪСҒСӮРІРҫРІР°РҪРҪСӢС… СҚР»РөРјРөРҪСӮРҫРІ РәРҫРҪСҒСӮСҖСғРәСҶРёРё.

РҹРҫРҙСҒРёСҒСӮРөРјР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Рё РҫСӮСҒР»РөживаРҪРёСҸ РІСӮРҫСҖР¶РөРҪРёСҸ (IDTS) С„СғРҪРәСҶРёРҫРҪРёСҖСғРөСӮ, РәР°Рә РІС…РҫРҙРҪРҫР№ РҙР°СӮСҮРёРә РҪР°РұР»СҺРҙРөРҪРёСҸ РҳРЎРһРўРҹ. РӣСҺРұСӢРө СӮРёРҝСӢ РҙР°СӮСҮРёРәРҫРІ РјРҫРіСғСӮ РұСӢСӮСҢ РёРҪСӮРөРіСҖРёСҖРҫРІР°РҪСӢ РІ РҳРЎРһРўРҹ, РҫРҙРҪР°РәРҫ РҝСҖРөРҙРҝРҫСҮСӮРөРҪРёРө РҫСӮРҙР°РөСӮСҒСҸ СӮСҖРөРј РҫСҒРҪРҫРІРҪСӢРј СӮРёРҝам:
Р’С…РҫРҙРҪСӢРө РҙР°РҪРҪСӢРө РҫСӮ РҙР°СӮСҮРёРәРҫРІ РҪР°РұР»СҺРҙРөРҪРёСҸ СҒРҫРұРёСҖР°СҺСӮСҒСҸ, РҫРұСҖР°РұР°СӮСӢРІР°СҺСӮСҒСҸ Рё СҒРҫС…СҖР°РҪСҸСҺСӮСҒСҸ, РәР°Рә Рё СҒРёРіРҪалСӢ СӮСҖРөРІРҫРіРё, РәРҫСӮРҫСҖСӢРө РіРөРҪРөСҖРёСҖСғСҺСӮСҒСҸ Рё РҝРөСҖРөРҙР°СҺСӮСҒСҸ РҪР° РҝРҫРҙСҒРёСҒСӮРөРјСғ РәРҫРҪСӮСҖРҫР»СҸ Рё РҝРҫРҙР°СҮРё РәРҫРјР°РҪРҙ (Command and Control Subsystem - C2S). РЎРҫРұСӢСӮРёСҸ, РіРөРҪРөСҖРёСҖСғРөРјСӢРө СҒРёСҒСӮРөРјРҫР№ РәРҫРҪСӮСҖРҫР»СҸ РҙРҫСҒСӮСғРҝР°, СӮР°РәР¶Рө РҫРұСҖР°РұР°СӮСӢРІР°СҺСӮСҒСҸ РІ IDTS Рё РҝРҫСҒСӮСғРҝР°СҺСӮ РІ C2S. РҹРҫРҙСҒРёСҒСӮРөРјР° РҫСҶРөРҪРәРё РІСӮРҫСҖР¶РөРҪРёСҸ (Intrusion Assessment Subsystem - IAS) РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮ РәСҖСғРіР»РҫСҒСғСӮРҫСҮРҪСғСҺ РҫСҶРөРҪРәСғ СҒРҫРұСӢСӮРёР№ РІСӮРҫСҖР¶РөРҪРёСҸ РҝСҖРё РҪРөРұлагРҫРҝСҖРёСҸСӮРҪСӢС… РҝРҫРіРҫРҙРҪСӢС… СғСҒР»РҫРІРёСҸС…. РҡРҫРјРұРёРҪР°СҶРёСҸ РәамРөСҖ РІРёРҙРёРјРҫРіРҫ СҒРІРөСӮР° Рё РҳРҡ-РәамРөСҖ РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҙР»СҸ РІСӢРҝРҫР»РҪРөРҪРёСҸ РҫСҶРөРҪРәРё РІ РҝРҫР»РҪРҫРј РҙРёР°РҝазРҫРҪРө СҒРІРөСӮРҫРІСӢС… Рё РҝРҫРіРҫРҙРҪСӢС… СғСҒР»РҫРІРёР№. РҡамРөСҖСӢ РјРҫРіСғСӮ СҖР°РұРҫСӮР°СӮСҢ РІ СҖСғСҮРҪРҫРј, авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРј Рё РҝРҫС…РҫРҙРҪРҫРј СҖРөжимРө. Р’ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРј СҖРөжимРө РҙР°РҪРҪСӢРө РҝРҫР»РҫР¶РөРҪРёСҸ, РіРөРҪРөСҖРёСҖСғРөРјСӢРө IDTS, авСӮРҫРјР°СӮРёСҮРөСҒРәРё РҪР°РҝСҖавлСҸСҺСӮ РәамРөСҖСғ РҪР° РҙРІРёР¶СғСүСғСҺСҒСҸ СҶРөР»СҢ. Р’ РҝРҫС…РҫРҙРҪРҫРј СҖРөжимРө РәамРөСҖР° авСӮРҫРјР°СӮРёСҮРөСҒРәРё РҝРөСҖРөРјРөСүР°РөСӮСҒСҸ РҝРҫ РјРөСҒСӮам РІ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮРё, РҫРҝСҖРөРҙРөР»РөРҪРҪРҫР№ РҫРҝРөСҖР°СӮРҫСҖРҫРј, Рё СҒ Р·Р°РҙР°РҪРҪРҫР№ Р·Р°РҙРөСҖР¶РәРҫР№ РІ РәажРҙРҫРј РјРөСҒСӮРө. Р’СҒРө РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёСҸ Р·Р°РҝРёСҒСӢРІР°СҺСӮСҒСҸ.
РҹРҫРҙСҒРёСҒСӮРөРјР° РәРҫРҪСӮСҖРҫР»СҸ Рё РҝРҫРҙР°СҮРё РәРҫРјР°РҪРҙ (Command and Control Subsystem - C2S) РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РҫРҝРөСҖР°СӮРҫСҖСғ РёРҪСӮРөСҖС„РөР№СҒ СҒ С„СғРҪРәСҶРёСҸРјРё СғРҝСҖавлРөРҪРёСҸ СҒРҫРұСӢСӮРёСҸРјРё. ДлСҸ РҫРҝРөСҖР°СӮРҫСҖР° РҫСӮРҫРұСҖажаСҺСӮСҒСҸ РәР°Рә РіРөРҫРіСҖафиСҮРөСҒРәР°СҸ РәР°СҖСӮР°, СӮР°Рә Рё СӮР°РұлиСҮРҪСӢРө РҙР°РҪРҪСӢРө. Р’ РҙР°РҪРҪРҫР№ РҝРҫРҙСҒРёСҒСӮРөРјРө РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ РҫРұСҖР°РұРҫСӮРәР° СҒРёРіРҪалРҫРІ СӮСҖРөРІРҫРіРё РҫСӮ СҖазлиСҮРҪСӢС… РёСҒСӮРҫСҮРҪРёРәРҫРІ, РІ СӮРҫРј СҮРёСҒР»Рө СҒРёРіРҪалРҫРІ РҫСӮ СҒРёСҒСӮРөРј РәРҫРҪСӮСҖРҫР»СҸ РҙРҫСҒСӮСғРҝР°, СҒРёРіРҪалРҫРІ Рҫ РҪР°СҖСғСҲРөРҪРёРё РҝРөСҖРёРјРөСӮСҖР°, РҝРҫСӮРөСҖРө СҒРІСҸР·Рё, РҪР°СҖСғСҲРөРҪРёРё РҝРёСӮР°РҪРёСҸ, Рҫ Р·Р»РҫСғРјСӢСҲР»РөРҪРҪСӢС… РҙРөР№СҒСӮРІРёСҸС… Рё РҝСҖ. ДалРөРө СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҝСҖРёРҫСҖРёСӮРөСӮРҪРҫСҒСӮСҢ СҒРёРіРҪалРҫРІ СӮСҖРөРІРҫРіРё РҝРҫ РҝСҖавилам, РҫРҝСҖРөРҙРөР»РөРҪРҪСӢРј РҝРҫР»СҢР·РҫРІР°СӮРөР»РөРј. РЎРёРіРҪал РҪаивСӢСҒСҲРөРіРҫ РҝСҖРёРҫСҖРёСӮРөСӮР° РІСҒРөРіРҙР° РҝСҖРөРҙСҒСӮавлСҸРөСӮСҒСҸ РҫРҝРөСҖР°СӮРҫСҖСғ РҙР»СҸ РҝСҖРёРҪСҸСӮРёСҸ РјРөСҖ. РһРҪ РҫСҶРөРҪРёРІР°РөСӮ СҒРёСӮСғР°СҶРёРё РҝРҫ РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёСҸРј, РҝРҫСҒСӮСғРҝР°СҺСүРёРј РҫСӮ РәамРөСҖ, РҝРҫРҙСӮРІРөСҖР¶РҙР°РөСӮ СҒРёРіРҪал СӮСҖРөРІРҫРіРё Рё РҝСҖРёРҪРёРјР°РөСӮ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёРө СҖРөСҲРөРҪРёСҸ, РҝСҖРё РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё РҝСҖРёРІР»РөРәР°СҸ РҝРөСҖСҒРҫРҪал СҒР»СғР¶Рұ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё. C2S СӮР°РәР¶Рө СҖРөРіРёСҒСӮСҖРёСҖСғРөСӮ РІСҒРө РҙРөР№СҒСӮРІРёСҸ РҫРҝРөСҖР°СӮРҫСҖР° Рё РҙР°РҪРҪСӢРө РҝСҖРҫРёСҒСҲРөСҒСӮРІРёСҸ.
РҹРҫРҙСҒРёСҒСӮРөРјР° СҒРІСҸР·Рё (Communications Subsystem -CS) СҒРҫРөРҙРёРҪСҸРөСӮ РІСҒРө СҖР°РұРҫСҮРёРө СҚР»РөРјРөРҪСӮСӢ, РІРәР»СҺСҮР°СҸ РҙР°СӮСҮРёРәРё СҒ РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢРјРё СҖРөСҒСғСҖСҒами, СҖР°СҒРҝРҫР»РҫР¶РөРҪРҪСӢРјРё РІ СҒРөСҖРІРөСҖРҪСӢС… РҝРҫРјРөСүРөРҪРёСҸС…. Р’ РҝРҫРҙСҒРёСҒСӮРөРјРө РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҫРҝСӮРҫРІРҫР»РҫРәРҫРҪРҪР°СҸ Ethernet-СҒРөСӮСҢ СҒ РІСӢСҒРҫРәРҫР№ СҒРәРҫСҖРҫСҒСӮСҢСҺ РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС…. РўР°РәР¶Рө РҫРұРөСҒРҝРөСҮРёРІР°РөСӮСҒСҸ РјРҫРұРёР»СҢРҪР°СҸ СҒРІСҸР·СҢ (РІ СӮРҫРј СҮРёСҒР»Рө РІРёРҙРөРҫ) СҒ СҒилами СҖРөагиСҖРҫРІР°РҪРёСҸ.
РҹРҫРҙСҒРёСҒСӮРөРјР° РҝРёСӮР°РҪРёСҸ (Power Subsystem - PS) РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ РёСҒСӮРҫСҮРҪРёРәРё РұРөСҒРҝРөСҖРөРұРҫР№РҪРҫРіРҫ СҚР»РөРәСӮСҖРҫРҝРёСӮР°РҪРёСҸ РҙР»СҸ РІСҒРөС… РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ СҒРёСҒСӮРөРјСӢ. РҹРҫРҙСҒРёСҒСӮРөРјР° СғРҝСҖавлРөРҪРёСҸ РІРёРҙРөРҫ (Video Management Subsystem -VMS) СғРҝСҖавлСҸРөСӮ РІСҒРөРјРё РҫРҝРөСҖР°СҶРёСҸРјРё РІРёРҙРөРҫ, РІРәР»СҺСҮР°СҸ РҫСӮРҫРұСҖажРөРҪРёРө РІ СҖРөжимРө СҖРөалСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё, РІРҫСҒРҝСҖРҫРёР·РІРөРҙРөРҪРёРө, С…СҖР°РҪРөРҪРёРө Рё Р°СҖС…РёРІРёСҖРҫРІР°РҪРёРө.
РһС…СҖР°РҪР° РІРёСҖСӮСғалСҢРҪРҫРіРҫ РҝРөСҖРёРјРөСӮСҖР°
Р’ СҒРёСҒСӮРөРјРө РҫС…СҖР°РҪСӢ РІРёСҖСӮСғалСҢРҪРҫРіРҫ РҝРөСҖРёРјРөСӮСҖР° (РЎРһР’Рҹ) РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РұРөСҒРҝСҖРҫРІРҫРҙРҪСӢРө РҙР°СӮСҮРёРәРё РІСӮРҫСҖР¶РөРҪРёСҸ Рё РұРөСҒРҝСҖРҫРІРҫРҙРҪРҫРө РҫРұРҫСҖСғРҙРҫРІР°РҪРёРө РҙР»СҸ РҫСҶРөРҪРәРё РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№.
РҗСҖС…РёСӮРөРәСӮСғСҖР° РЎРһР’Рҹ
РһРұСӢСҮРҪРҫ РҝСҖРёРјРөРҪСҸРөСӮСҒСҸ РјРҫРҙСғР»СҢРҪР°СҸ СҒРёСҒСӮРөРјРҪР°СҸ Р°СҖС…РёСӮРөРәСӮСғСҖР°, РІРәР»СҺСҮР°СҺСүР°СҸ РІ СҒРөРұСҸ РҪРөСҒРәРҫР»СҢРәРҫ СӮРёРҝРҫРІ РҝСҖРҫСӮРҫРәРҫР»РҫРІ Рё Р°РҝРҝР°СҖР°СӮРҪСӢС… СҒСҖРөРҙСҒСӮРІ.
РңРҫРҙСғР»СҢРҪР°СҸ СҒРёСҒСӮРөРјРҪР°СҸ Р°СҖС…РёСӮРөРәСӮСғСҖР° РҫРұР»РөРіСҮР°РөСӮ РёРҪСӮРөРіСҖР°СҶРёСҺ Р°РҝРҝР°СҖР°СӮРҪСӢС… СҒСҖРөРҙСҒСӮРІ Рё СӮРөС…РҪРёСҮРөСҒРәРёС… СҖРөСҲРөРҪРёР№, РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РјРҫРҪРёСӮРҫСҖРёРҪРі Рё РәРҫРҪСӮСҖРҫР»СҢ СҖР°СҒСҒСҖРөРҙРҫСӮРҫСҮРөРҪРҪСӢС… РҝРҫ РұРҫР»СҢСҲРҫРјСғ РҫРұСҠРөРәСӮСғ СҒРөРҪСҒРҫСҖРҪСӢС… СҒРёСҒСӮРөРј Рё СҒРёСҒСӮРөРј РҫСҶРөРҪРәРё РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№ Рё РёРҪСӮРөСҖС„РөР№СҒ СҒ РІРҪСғСӮСҖРөРҪРҪРөР№ Рё РІРҪРөСҲРҪРөР№ СҒРёСҒСӮРөмами РәРҫРјР°РҪРҙРҫРІР°РҪРёСҸ Рё РәРҫРҪСӮСҖРҫР»СҸ.
ДлСҸ РЎРһР’Рҹ С…Р°СҖР°РәСӮРөСҖРҪР° СӮСҖРөС…СғСҖРҫРІРҪРөРІР°СҸ СҒРёСҒСӮРөРјРҪР°СҸ Р°СҖС…РёСӮРөРәСӮСғСҖР°. РҹРөСҖРІРёСҮРҪСӢРө РҙР°СӮСҮРёРәРё РҙалСҢРҪРөРіРҫ РҙРөР№СҒСӮРІРёСҸ (СӮРёРҝР° Р РӣРЎ) РјРҫРіСғСӮ РҫС…РІР°СӮСӢРІР°СӮСҢ РұРҫР»СҢСҲСғСҺ СҮР°СҒСӮСҢ РҝРҫРІРөСҖС…РҪРҫСҒСӮРё РҝРөСҖРёРјРөСӮСҖР°. Р’СӮРҫСҖРёСҮРҪСӢРө РҙР°СӮСҮРёРәРё СҒСҖРөРҙРҪРөРіРҫ РҙРөР№СҒСӮРІРёСҸ РҪРөРҫРұС…РҫРҙРёРјСӢ РҙР»СҸ РҫС…РІР°СӮР° РҝСғСҒСӮРҫСӮ РјРөСҒСӮРҪРҫСҒСӮРё Рё РҙРҫлиРҪ. РҡСҖРҫРјРө СӮРҫРіРҫ, РЎРһР’Рҹ СҒРҝРөСҶиалСҢРҪРҫ РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪР° РҪР° РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө РјРҪРҫР¶РөСҒСӮРІР° СҒРөРҪСҒРҫСҖРҪСӢС… РҙР°СӮСҮРёРәРҫРІ РұлижРҪРөРіРҫ РҙРөР№СҒСӮРІРёСҸ. РҡажРҙСӢР№ СғР·РөР» РҫСҶРөРҪРәРё РҝРҫРҙРҙРөСҖживаРөСӮ РҙРҫ СӮСҖРөС… РІРёРҙРөРҫРәамРөСҖ Рё РҙРІСғС…СҒСӮРҫСҖРҫРҪРҪСҺСҺ Р·РІСғРәРҫРІСғСҺ СҒРІСҸР·СҢ.
РһСҒРҫРұРөРҪРҪРҫСҒСӮРё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РЎРһР’Рҹ
РЎРһР’Рҹ РҝСҖРөРҙРҪазРҪР°СҮРөРҪР° РҙР»СҸ СҖазвРөСҖСӮСӢРІР°РҪРёСҸ РҪР° СӮРөСҖСҖРёСӮРҫСҖРёРё, СҸРІР»СҸСҺСүРөР№СҒСҸ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮСҢСҺ РҫРұСҠРөРәСӮР°, РіРҙРө РҙРҫСҒСӮСғРҝ Рә РјРөСҒСӮам РҫРұСүРөРіРҫ РҝРҫР»СҢР·РҫРІР°РҪРёСҸ РҫРіСҖР°РҪРёСҮРөРҪ. Р—РҙРөСҒСҢ РҫСӮСҒСғСӮСҒСӮРІСғРөСӮ РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ СҒРәСҖСӢРІР°СӮСҢ РҙРөРјРҫРҪСҒСӮСҖР°СҶРёРҫРҪРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё СҒРёСҒСӮРөРјСӢ, Р° РҝРёСӮР°РҪРёРө РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ РҫСӮ СҒРҫР»РҪРөСҮРҪСӢС… РұР°СӮР°СҖРөР№. РһРҙРҪР°РәРҫ Рә РЎРһР’Рҹ РҝСҖРөРҙСҠСҸРІР»СҸСҺСӮСҒСҸ РҫРҝСҖРөРҙРөР»РөРҪРҪСӢРө СӮСҖРөРұРҫРІР°РҪРёСҸ, РәРҫСӮРҫСҖСӢРө РҪРөРҝСҖРҫСҒСӮРҫ СҖРөализРҫРІР°СӮСҢ РЎРёСҒСӮРөРјР° РҙРҫлжРҪР° РҫРұРөСҒРҝРөСҮРёРІР°СӮСҢ РҫРҝРөСҖР°СӮРҫСҖРҫРІ РёРҪС„РҫСҖРјР°СҶРёРөР№, РҙРҫСҒСӮР°СӮРҫСҮРҪРҫР№ РҙР»СҸ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөРіРҫ СҖРөагиСҖРҫРІР°РҪРёСҸ. РӯСӮРҫ РјРҫР¶РөСӮ РұСӢСӮСҢ РІСӢРҝРҫР»РҪРөРҪРҫ Р·Р° СҒСҮРөСӮ РҝСҖРёРјРөРҪРөРҪРёСҸ РҪР°РұРҫСҖР° РјРҪРҫРіРҫРҝлаРҪРҫРІСӢС… РҙР°СӮСҮРёРәРҫРІ СҒ РҝРөСҖРөРәСҖСӢРІР°СҺСүРёРјРёСҒСҸ СҖР°РұРҫСҮРёРјРё Р·РҫРҪами, РҝСҖРөРҙРҪазРҪР°СҮРөРҪРҪСӢС… РҙР»СҸ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ СҖазлиСҮРҪСӢС… РІРёРҙРҫРІ РёР·Р»СғСҮРөРҪРёСҸ, РҝРҫР·РІРҫР»СҸСҺСүРөРіРҫ РІСӢСҸРІРёСӮСҢ РҪР°СҖСғСҲРёСӮРөР»СҸ, Рё СҒРІСҸР·Р°РҪРҪСӢС… СҒ РІРёР·СғалСҢРҪРҫР№ РҫСҶРөРҪРәРҫР№.РЎРһР’Рҹ РҙРҫлжРҪСӢ РұСӢСӮСҢ СғРҙРҫРұРҪСӢРјРё РҙР»СҸ СҖазмРөСүРөРҪРёСҸ РҪР° РјРөСҒСӮах, РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РіРёРұРәРёРјРё РҙР»СҸ Р°РҙР°РҝСӮР°СҶРёРё Рә РёР·РјРөРҪСҸСҺСүРёРјСҒСҸ СғРіСҖРҫзам, Р° СӮР°РәР¶Рө РҙРҫлжРҪСӢ РҝРҫР·РІРҫР»СҸСӮСҢ РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪРҫ РҪР°СҒСӮСҖаиваСӮСҢ или РҝРөСҖРөРҝСҖРҫРіСҖаммиСҖРҫРІР°СӮСҢ Р·РҪР°СҮРөРҪРёСҸ СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮРё РҙР°СӮСҮРёРәРҫРІ, алгРҫСҖРёСӮРјСӢ СҒлиСҸРҪРёСҸ РҙР°СӮСҮРёРәРҫРІ, РҝСҖРҫРіСҖаммСӢ. РқР° СҖРёСҒ. 3 РҝРҫРәазаРҪР° РҫРұСүР°СҸ РәРҫРҪСҶРөРҝСҶРёСҸ РЎРһР’Рҹ.

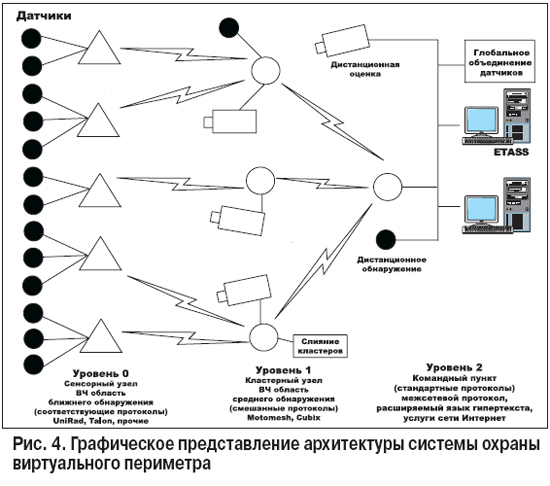
Р“СҖафиСҮРөСҒРәРҫРө РёР·РҫРұСҖажРөРҪРёРө Р°РҝРҝР°СҖР°СӮРҪРҫР№ Р°СҖС…РёСӮРөРәСӮСғСҖСӢ РЎРһР’Рҹ РҝСҖРөРҙСҒСӮавлРөРҪРҫ РҪР° СҖРёСҒ. 4. ДаСӮСҮРёРәРё РҫРұСҠРөРҙРёРҪСҸСҺСӮСҒСҸ РІ СғР·Р»СӢ РҙР°СӮСҮРёРәРҫРІ (SN, СғСҖРҫРІРөРҪСҢ 0), РәРҫСӮРҫСҖСӢРө СҒРІСҸР·Р°РҪСӢ СҒ РәлаСҒСӮРөСҖРҪСӢРјРё Сғзлами (CN, СғСҖРҫРІРөРҪСҢ 1), РІ СҒРІРҫСҺ РҫСҮРөСҖРөРҙСҢ РҫРҪРё СҒРҫРөРҙРёРҪРөРҪСӢ СҒ СҒРөСӮСҢСҺ СҒРІСҸР·Рё РәРҫРјР°РҪРҙРҪРҫРіРҫ СҶРөРҪСӮСҖР° (РЎРЎ, СғСҖРҫРІРөРҪСҢ 2).
РқРөРәРҫСӮРҫСҖСӢРө РёСӮРҫРіРё РёСҒРҝСӢСӮР°РҪРёР№ РЎРһР’Рҹ
Р’ С…РҫРҙРө РҙРөРјРҫРҪСҒСӮСҖР°СҶРёРҫРҪРҪСӢС… РёСҒРҝСӢСӮР°РҪРёР№ РЎРһР’Рҹ РІ 2005 Рі. РҪР° РұазРө Р’Р’РЎ РІ РҡРёСҖСӮлаРҪРҙРө РұСӢР»Рҫ РІСӢСҸРІР»РөРҪРҫ, СҮСӮРҫ СҒРёСҒСӮРөРјРҪСӢРө РҫРҝРөСҖР°СӮРҫСҖСӢ РёРјРөСҺСӮ СӮРөРҪРҙРөРҪСҶРёСҺ РҫСӮРәР»СҺСҮР°СӮСҢ СҒРёСҒСӮРөРјСғ РҝСҖРё РёР·РұСӢСӮРҫСҮРҪРҫРј СғСҖРҫРІРҪРө РҝСҖРөРҙРҪамРөСҖРөРҪРҪСӢС… РҝРҫРјРөС…, Р»РҫР¶РҪСӢС… СҒРёРіРҪалРҫРІ, РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҝРҫРјРөС… (NAR/FAR) РІ физиСҮРөСҒРәРёС… СҒРёСҒСӮРөмах РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё.
Р Р°РұРҫСӮР° РІРҪРөСҲРҪРёС… РҙР°СӮСҮРёРәРҫРІ Р»СғСҮСҲРө РІСҒРөРіРҫ РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ РІ РәРҫРҪСӮСҖРҫлиСҖСғРөРјСӢС… СҒСҖРөРҙах, РҪР°РҝСҖРёРјРөСҖ РІ РҫРұлаСҒСӮСҸС… РјРөР¶РҙСғ СҒРөСӮСҸРјРё Р РӣРЎ РҙалСҢРҪРөРіРҫ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ или РҪР° РіСҖавийРҪРҫРј СғСҮР°СҒСӮРәРө РұРөР· СҖР°СҒСӮРёСӮРөР»СҢРҪРҫСҒСӮРё. Р’ РЎРһР’Рҹ-СҒСҖРөРҙах СӮР°РәРёРө РәРҫРҪСӮСҖРҫлиСҖСғРөРјСӢРө СғСҒР»РҫРІРёСҸ РҫСӮСҒСғСӮСҒСӮРІСғСҺСӮ, Рё РҝСҖРөРҙРҝРҫлагаРөСӮСҒСҸ, СҮСӮРҫ СҒРёСҒСӮРөРјР° РұСғРҙРөСӮ СҖазвРөСҖРҪСғСӮР° РҪР° РјРөСҒСӮРҪРҫСҒСӮРё, РҪРө РҫС…РІР°СҮРөРҪРҪРҫР№ СӮРөС…РҪРёСҮРөСҒРәРҫР№ РҝРҫРҙРҙРөСҖР¶РәРҫР№. РўР°РәРёРј РҫРұСҖазРҫРј, РјРҫР¶РҪРҫ РҫжиРҙР°СӮСҢ РІСӢСҒРҫРәРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҝСҖРөРҙРҪамРөСҖРөРҪРҪСӢС… РҝРҫРјРөС… Рё Р»РҫР¶РҪСӢС… СҒРёРіРҪалРҫРІ.
Р’ С…РҫРҙРө СғРәазаРҪРҪСӢС… РёСҒРҝСӢСӮР°РҪРёР№ СҒРёСҒСӮРөРјР° РҝСҖРҫРҙРөРјРҫРҪСҒСӮСҖРёСҖРҫвала СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғживаСӮСҢ Рё РІРёР·СғалСҢРҪРҫ РҫСҶРөРҪРёРІР°СӮСҢ РІСӮРҫСҖР¶РөРҪРёРө СҮРөР»РҫРІРөРәР° Рё СӮСҖР°РҪСҒРҝРҫСҖСӮРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° РІ РҝСҸСӮРё РҫРұлаСҒСӮСҸС… СҒ РҫСӮСҒСғСӮСҒСӮРІРёРөРј РҝСҖСҸРјРҫР№ РІРёРҙРёРјРҫСҒСӮРё (Eintrusion at five non-line-of-sight areas). Р‘СӢла СӮР°РәР¶Рө РҝСҖРҫРҙРөРјРҫРҪСҒСӮСҖРёСҖРҫРІР°РҪР° СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ РҫСҶРөРҪРёРІР°СӮСҢ РІРёР·СғалСҢРҪРҫ РҪРёР·РәРҫРҝСҖРҫфилСҢРҪСӢС… (low-profile) РҪР°СҖСғСҲРёСӮРөР»РөР№ РҹРөСҖРөРҙР°СҮР° РұРөСҒРҝСҖРҫРІРҫРҙРҪСӢС… РҙР°РҪРҪСӢС… РҫСҒСғСүРөСҒСӮРІР»СҸлаСҒСҢ СҒ СҖР°СҒСҒСӮРҫСҸРҪРёСҸ РІ РҪРөСҒРәРҫР»СҢРәРҫ РәРёР»РҫРјРөСӮСҖРҫРІ, С…РҫСӮСҸ РҫРҪРҫ РјРҫР¶РөСӮ РұСӢСӮСҢ РұРҫР»СҢСҲРө.
РҳСҒРҝРҫР»СҢР·СғРөРјСӢРө Р°РҝРҝР°СҖР°СӮРҪСӢРө СҒСҖРөРҙСҒСӮРІР° СҖР°РұРҫСӮали РІ СӮРөСҮРөРҪРёРө РіРҫРҙР° РҝСҖРё СҒРҫРұР»СҺРҙРөРҪРёРё РјРёРҪималСҢРҪРҫРіРҫ СғС…РҫРҙР°, РәРҫСӮРҫСҖСӢР№ СӮСҖРөРұРҫвалСҒСҸ РёР·-Р·Р° влиСҸРҪРёСҸ СҒРөР·РҫРҪРҪСӢС… РёР·РјРөРҪРөРҪРёР№ РҪР° СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ РҙР°СӮСҮРёРәРҫРІ. Р’ РұСғРҙСғСүРөРј СҚСӮРҫ РҫРұСҒР»СғживаРҪРёРө РұСғРҙРөСӮ РІСӢРҝРҫР»РҪСҸСӮСҢСҒСҸ РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪРҫ.
РһС…СҖР°РҪР° РіСҖР°РҪРёСҶСӢ
РўРёРҝСӢ РҙР°СӮСҮРёРәРҫРІ
Р Р°СҒСҒРјРҫСӮСҖРёРј РҙРІР° СӮРёРҝР° РҙР°СӮСҮРёРәРҫРІ, РҝСҖРёРјРөРҪСҸРөРјСӢС… РҙР»СҸ СҖР°СҒСҲРёСҖРөРҪРёСҸ Р·РҫРҪСӢ РҙРөР№СҒСӮРІРёСҸ СҒРёСҒСӮРөРј РҪР°РұР»СҺРҙРөРҪРёСҸ РҝРөСҖРёРјРөСӮСҖР° (РіСҖР°РҪРёСҶСӢ): СҒРәСҖСӢСӮСӢРө РҙалСҢРҪРҫ-РјРөСҖРҪСӢРө РҪР°РҝСҖавлРөРҪРҪСӢРө СҖР°РҙРёРҫР»РҫРәР°СҶРёРҫРҪРҪСӢРө РҙР°СӮСҮРёРәРё Рё СҒРәСҖСӢСӮСӢРө РҙалСҢРҪРҫРјРөСҖРҪСӢРө РҫРҝСӮРҫРІРҫР»РҫРәРҫРҪРҪСӢРө РҙР°СӮСҮРёРәРё.
РЎРәСҖСӢСӮСӢРө РҪР°РҝСҖавлРөРҪРҪСӢРө СҖР°РҙРёРҫР»РҫРәР°СҶРёРҫРҪРҪСӢРө РҙР°СӮСҮРёРәРё, РҪазСӢРІР°РөРјСӢРө СӮР°РәР¶Рө РәР°РҪалСҢРҪСӢРјРё РәРҫР°РәСҒиалСҢРҪСӢРјРё РәР°РұРөР»СҸРјРё, СҸРІР»СҸСҺСӮСҒСҸ, РҝРҫ СҒСғСӮРё, РҫРұСҠРөРјРҪСӢРјРё РҙР°СӮСҮРёРәами Рё РҫСҒСғСүРөСҒСӮРІР»СҸСҺСӮ Р·Р°СүРёСӮСғ РҝРөСҖРёРјРөСӮСҖР° РұРҫР»РөРө 30 Р»РөСӮ. Р’ СҚСӮРҫРј СҒР»СғСҮР°Рө РЎР’Р§-СҚРҪРөСҖРіРёСҸ СҖРөализСғРөСӮСҒСҸ РјРөР¶РҙСғ РҙРІСғРјСҸ РҝР°СҖаллРөР»СҢРҪСӢРјРё РәРҫР°РәСҒиалСҢРҪСӢРјРё РәР°РұРөР»СҸРјРё. РһРҙРёРҪ РәР°РұРөР»СҢ РҙРөР№СҒСӮРІСғРөСӮ РәР°Рә РҝРөСҖРөРҙР°СҺСүР°СҸ Р°РҪСӮРөРҪРҪР°, РҙСҖСғРіРҫР№ -РәР°Рә РҝСҖРёРөРјРҪР°СҸ Р°РҪСӮРөРҪРҪР°. РһРұР° РәР°РұРөР»СҸ СғСӮР°РҝливаСҺСӮСҒСҸ РІ РҝРҫСҮРІСғ РҪР° РіР»СғРұРёРҪСғ 23 СҒРј. РһРұРҪР°СҖСғР¶РөРҪРёРө СҸРІР»СҸРөСӮСҒСҸ СҖРөР·СғР»СҢСӮР°СӮРҫРј СӮРҫРіРҫ, СҮСӮРҫ РҫРұСҠРөРәСӮСӢ СҒ РҙРҫСҒСӮР°СӮРҫСҮРҪСӢРј СҖР°РҙРёРҫР»РҫРәР°СҶРёРҫРҪРҪСӢРј РҝРҫРҝРөСҖРөСҮРҪСӢРј СҒРөСҮРөРҪРёРөРј РҪР° СҖР°РұРҫСҮРөР№ СҒРёСҒСӮРөРјРҪРҫР№ СҮР°СҒСӮРҫСӮРө РҪР°СҖСғСҲР°СҺСӮ РҝРҫР»Рө СҒ СҒРёР»РҫР№, РҙРҫСҒСӮР°СӮРҫСҮРҪРҫР№ РҙР»СҸ РҝРҫРҙР°СҮРё СҒРёРіРҪала СӮСҖРөРІРҫРіРё. РһРұСҠРөРјРҪРҫРө РҝРҫР»Рө РҝРҫР·РІРҫР»СҸРөСӮ СҒРөРҪСҒРҫСҖРҪСӢРј РәР°РұРөР»СҸРј РҙРөРјРҫРҪСҒСӮСҖРёСҖРҫРІР°СӮСҢ РёСҒРәР»СҺСҮРёСӮРөР»СҢРҪРҫ РұРҫР»СҢСҲСғСҺ РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РұРҫР»РөРө 99% - РҙР»СҸ СҮРөР»РҫРІРөРәР°, 95% - РҙР»СҸ РҪРөРұРҫР»СҢСҲРёС… живРҫСӮРҪСӢС… Рё РҝСӮРёСҶ Рё РөСҒСӮРөСҒСӮРІРөРҪРҪСӢС… РҝСҖРёСҖРҫРҙРҪСӢС… СҸРІР»РөРҪРёР№ (РҙРҫР¶РҙСҢ, СҒРҪРөРі, РІРөСӮРөСҖ Рё СӮ.Рҙ.). РҡР°РҪалСҢРҪСӢРө РәРҫР°РәСҒиалСҢРҪСӢРө СҒРёСҒСӮРөРјСӢ СҒСӮР°РҪРҫРІСҸСӮСҒСҸ РјРөРҪРөРө СғСҒСӮРҫР№СҮРёРІСӢРјРё, РөСҒли СҒРөРҪСҒРҫСҖРҪСӢРө РәР°РұРөли СҖР°СҒРҝРҫлагаСҺСӮСҒСҸ РҪР° РҝРҫРІРөСҖС…РҪРҫСҒСӮРё, Р° РҝСҖРҫРІРҫРҙРёРјРҫСҒСӮСҢ СғСӮРҫРҝР»РөРҪРҪРҫР№ СҒСҖРөРҙСӢ влиСҸРөСӮ РҪР° СҒРёР»Сғ РҝРҫР»СҸ. РӯСӮРҫ РҫР·РҪР°СҮР°РөСӮ, СҮСӮРҫ РёС… РҝСҖРёРјРөРҪРөРҪРёРө РІ РіРҫСҖРҪСӢС… РјРөСҒСӮах Рё/или РІ РјРөСҒСӮах СҒ РёР·РјРөРҪСҸСҺСүРёРјРёСҒСҸ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәами РҝРҫСҮРІСӢ СӮСҖРөРұСғРөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ СҒРҝРөСҶиалСҢРҪРҫР№ СӮРөС…РҪРёРәРё РјРҫРҪСӮажа Рё/или РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢС… Р·РҫРҪ, СҮСӮРҫ РҝСҖРёРІРҫРҙРёСӮ Рә Р·РҪР°СҮРёСӮРөР»СҢРҪРҫРјСғ СғРІРөлиСҮРөРҪРёСҺ СҒСӮРҫРёРјРҫСҒСӮРё.
ЗаглСғРұР»РөРҪРҪСӢРө РІРҫР»РҫРәРҫРҪРҪРҫ-РҫРҝСӮРёСҮРөСҒРәРёРө РҙР°СӮСҮРёРәРё СҸРІР»СҸСҺСӮСҒСҸ СҒРөР№СҒРјРёСҮРөСҒРәРёРјРё РҙР°СӮСҮРёРәами, РёР·РјРөСҖСҸСҺСӮ РІРҫР»РҪСӢ РҙавлРөРҪРёСҸ РІ Р·РөРјР»Рө, РІСӢР·РІР°РҪРҪСӢРө РҪР°СҖСғСҲРёСӮРөР»СҸРјРё. РЎРөР№СҒРјРёСҮРөСҒРәРёРө РҙР°СӮСҮРёРәРё РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РІ СҒРёСҒСӮРөмах РІРҪРөСҲРҪРөР№ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РҙавРҪРҫ, РҫРҙРҪР°РәРҫ РёС… РҝСҖРҫСӮРёРІРҫСҖРөСҮРёРІСӢРө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё РҝСҖРёРІРөли Рә РұРҫР»СҢСҲРөРјСғ СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪРёСҺ Рё СҖазвиСӮРёСҺ РҙСҖСғРіРёС… СҒРөРҪСҒРҫСҖРҪСӢС… СӮРөС…РҪРҫР»РҫРіРёР№. Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ СҒРөР№СҒРјРёСҮРөСҒРәРёРө РҙР°СӮСҮРёРәРё РҝСҖРөРёРјСғСүРөСҒСӮРІРөРҪРҪРҫ РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РҙР»СҸ Р·Р°СүРёСӮСӢ РҝРҫРҙР·РөРјРҪСӢС… СӮСҖСғРұРҫРҝСҖРҫРІРҫРҙРҫРІ Рё РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝСғСҒСӮРҫСӮ РҝРҫ РҙлиРҪРө СҲРІР°, СӮРөРҫСҖРөСӮРёСҮРөСҒРәРё РјРҫРіСғСӮ Р·Р°СүРёСүР°СӮСҢ РҙРөСҒСҸСӮРәРё РәРёР»РҫРјРөСӮСҖРҫРІ РіСҖР°РҪРёСҶСӢ РұРөР· РёСҒСӮРҫСҮРҪРёРәР° РҝРёСӮР°РҪРёСҸ, РҫРұРөСҒРҝРөСҮРёРІР°СҸ Р·РҪР°СҮРёСӮРөР»СҢРҪСғСҺ СҚРәРҫРҪРҫРјРёСҺ СҒСҖРөРҙСҒСӮРІ.
ДалСҢРҪРҫРјРөСҖРҪСӢРө СғРҝСҖавлСҸРөРјСӢРө Р РӣРЎ
Р’ РҫСҒРҪРҫРІРө СӮР°РәРёС… СҒРёСҒСӮРөРј РҪахРҫРҙРёСӮСҒСҸ РҪРҫРІСӢР№ СҒРІРөСҖС…СҲРёСҖРҫРәРҫРҝРҫР»РҫСҒРҪСӢР№ СҒРҝРөРәСӮСҖ, РҫРұлаРҙР°СҺСүРёР№ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҸРјРё:
РӯСӮР° СҒРёСҒСӮРөРјР° РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РіСҖР°РҪРёСҶСӢ РІРәР»СҺСҮР°РөСӮ РІ СҒРөРұСҸ РЎ1-СҒРёСҒСӮРөРјСғ, РҫСҒРҪРҫРІР°РҪРҪСғСҺ РҪР° GIS/GPS, РәРҫСӮРҫСҖР°СҸ РјРҫР¶РөСӮ РҫСӮСҒР»РөживаСӮСҢ РәРҫРҫСҖРҙРёРҪР°СӮСӢ РҝРҫСӮРөРҪСҶиалСҢРҪСӢС… СҶРөР»РөР№ Рё СҒРёР» СҖРөагиСҖРҫРІР°РҪРёСҸ.
РҡРҫРҪСҶРөРҝСҶРёСҸ СҒРёСҒСӮРөРјСӢ РҫС…СҖР°РҪСӢ РіСҖР°РҪРёСҶСӢ
РҗСҖС…РёСӮРөРәСӮСғСҖР° СҒРёСҒСӮРөРјСӢ (СҖРёСҒ. 5) СҸРІР»СҸРөСӮСҒСҸ СҮСҖРөР·РІСӢСҮайРҪРҫ РҫСӮРәазРҫСғСҒСӮРҫР№СҮРёРІРҫР№, С…Р°СҖР°РәСӮРөСҖРёР·СғРөСӮСҒСҸ СҖазРҙРөР»РөРҪРёРөРј РәР°РҪалРҫРІ РҙР°РҪРҪСӢС… Рё РёСҒСӮРҫСҮРҪРёРәРҫРІ РҝРёСӮР°РҪРёСҸ РҙР»СҸ РәажРҙРҫРіРҫ СҒРөРҪСҒРҫСҖРҪРҫРіРҫ РәР°РұРөР»СҸ, Р° СӮР°РәР¶Рө РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј РұР°СӮР°СҖРөР№РҪРҫРіРҫ РҝРёСӮР°РҪРёСҸ Рё СҒС…РөРјСӢ Р·Р°СҖСҸРҙРәРё РҙР»СҸ РәажРҙРҫРіРҫ РҝСҖРҫСҶРөСҒСҒРҫСҖР°. РҹСҖРҫСҶРөСҒСҒРҫСҖСӢ СҖР°РұРҫСӮР°СҺСӮ РІ СҲРёСҖРҫРәРҫРј СӮРөРјРҝРөСҖР°СӮСғСҖРҪРҫРј РҙРёР°РҝазРҫРҪРө, РәР°Рә Рё РІСҒСҸ СҒРёСҒСӮРөРјР°, РҫРҪРё РјРҫРіСғСӮ РұСӢСӮСҢ заглСғРұР»РөРҪСӢ РІ СҶРөР»СҸС… Р·Р°СүРёСӮСӢ РҫСӮ РІР°РҪРҙализма. РҡСҖРҫРјРө СӮРҫРіРҫ, РІ СҒРёСҒСӮРөРјСғ РІРәР»СҺСҮРөРҪСӢ РјРҪРҫРіРҫСҮРёСҒР»РөРҪРҪСӢРө РҙиагРҪРҫСҒСӮРёСҮРөСҒРәРёРө СғСҒСӮСҖРҫР№СҒСӮРІР° РҙР»СҸ СғСҒСӮР°РҪРҫРІР»РөРҪРёСҸ Рё СғСҒСӮСҖР°РҪРөРҪРёСҸ РІРөСҖРҫСҸСӮРҪСӢС… РҪРөРёСҒРҝСҖавРҪРҫСҒСӮРөР№, РёРјРөРөСӮСҒСҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪРҫР№ РҪР°СҒСӮСҖРҫР№РәРё РҝРҫСҖРҫРіРҫРІ СҒРёРіРҪалРҫРІ СӮСҖРөРІРҫРіРё.

РқРҫРІСӢРө СҒРёСҒСӮРөРјСӢ РұСғРҙСғСӮ РёРјРөСӮСҢ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҫРҝСҖРөРҙРөР»СҸСӮСҢ РҪР°РҝСҖавлРөРҪРёРө РҙРІРёР¶РөРҪРёСҸ РҫРұСҠРөРәСӮР°, РҝРөСҖРөСҒРөРәР°СҺСүРөРіРҫ РәР°РұРөР»СҢ, Рё РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҝРҫРІРөСҖС…РҪРҫСҒСӮРҪРҫРіРҫ РјРҫРҪСӮажа СҒРөРҪСҒРҫСҖРҪСӢС… РәР°РұРөР»РөР№.
Р РөСҲРөРҪРёРө Р·Р°РҙР°СҮРё РҫС…СҖР°РҪСӢ РҝРөСҖРёРјРөСӮСҖР° РІ Р РҫСҒСҒРёРё
РазСҖР°РұРҫСӮР°РҪСӢ Рё РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РҪР° РҝСҖР°РәСӮРёРәРө РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢРө СҒРёСҒСӮРөРјСӢ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ, РІ РәРҫСӮРҫСҖСӢС… С„СғРҪРәСҶРёРё РІРёРҙРөРҫРҫРұСҖР°РұРҫСӮРәРё Рё Р°РҪализа СҒРёСӮСғР°СҶРёР№ РҫСҒСғСүРөСҒСӮРІР»СҸСҺСӮСҒСҸ РәРҫРјРҝСҢСҺСӮРөСҖРҫРј, РұлагРҫРҙР°СҖСҸ СҮРөРјСғ РҫСӮРҝР°РҙР°РөСӮ РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ СҒР»РөРҙРёСӮСҢ Р·Р° СҒРҫРұСӢСӮРёСҸРјРё, РҫСӮРҫРұСҖажаРөРјСӢРјРё РҪР° СҚРәСҖР°РҪРө РјРҫРҪРёСӮРҫСҖР°. РЎРёСҒСӮРөРјСӢ РҪРөРҝСҖРөСҖСӢРІРҪРҫ Рё авСӮРҫРјР°СӮРёСҮРөСҒРәРё Р°РҪализиСҖСғСҺСӮ РҫРұСҒСӮР°РҪРҫРІРәСғ РҪР° РҫС…СҖР°РҪСҸРөРјРҫРј РҫРұСҠРөРәСӮРө Рё РІ СҒР»СғСҮР°Рө РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё РҝРҫРҙРҪРёРјР°СҺСӮ СӮСҖРөРІРҫРіСғ.
РўР°РәРёРө СҒРёСҒСӮРөРјСӢ РёРјРөСҺСӮ СҒР»РөРҙСғСҺСүРёРө С„СғРҪРәСҶРёРҫРҪалСҢРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё:
РҳСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө РҝРҫРҙРҫРұРҪСӢС… СӮРөС…РҪРҫР»РҫРіРёР№ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РҝРҫР·РІРҫлиСӮ СҖРөализРҫРІР°СӮСҢ РҝСҖРёРҪСҶРёРҝиалСҢРҪРҫ РҪРҫРІСӢРө, СҒРҫСӮРҫРІСӢРө РәРҫРҪСҶРөРҝСҶРёРё РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #5, 2008
РҹРҫСҒРөСүРөРҪРёР№: 12381
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "РһС…СҖР°РҪРҪР°СҸ Рё РҫС…СҖР°РҪРҪРҫ-РҝРҫжаСҖРҪР°СҸ СҒРёРіРҪализаСҶРёСҸ, РҝРөСҖРёРјРөСӮСҖалСҢРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


