






Р’ СҖСғРұСҖРёРәСғ "ДиСҖРөРәСӮРҫСҖ РҝРҫ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№

РҹРҫРјРёРјРҫ РҫСҮРөРІРёРҙРҪРҫРіРҫ РҝСҖРёРјРөРҪРөРҪРёСҸ РІ РҪаиРұРҫР»РөРө СӮСҖРөРұРҫРІР°СӮРөР»СҢРҪСӢС… Рә РәР°СҮРөСҒСӮРІСғ РёР·РҫРұСҖажРөРҪРёСҸ (РіРҙРө РҪРө РІСҒРөРіРҙР° СҒРҝСҖавлСҸСҺСӮСҒСҸ IP-РәамРөСҖСӢ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ) РәРҫРјРҝР»РөРәСҒах РҫРұРөСҒРҝРөСҮРөРҪРёСҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РҪР° СҒРҝРҫСҖСӮРёРІРҪСӢС… Р°СҖРөРҪах (СҖР°СҒРҝРҫР·РҪаваРҪРёРө лиСҶ, РҫРҝР°СҒРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ Рё РҝСҖ.), СӮРөС…РҪРҫР»РҫРіРёРё РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РҪахРҫРҙСҸСӮ РІ СҒРҝРҫСҖСӮРө РјРҪРҫРіРҫ РҙСҖСғРіРёС… РҝСҖРёРјРөРҪРөРҪРёР№:
РқРёР¶Рө РјСӢ РҝРҫРҝСҖРҫРұСғРөРј РұРҫР»РөРө РҝРҫРҙСҖРҫРұРҪРҫ РҫСҒСӮР°РҪРҫРІРёСӮСҢСҒСҸ РҪР° СӮСҖРөРұРҫРІР°РҪРёСҸС… Рә РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҺ РІ РәРҫРҪРәСҖРөСӮРҪСӢС… РҫРұлаСҒСӮСҸС… РҝСҖРёРјРөРҪРөРҪРёСҸ, РҪРҫ РҪР°СҮРҪРөРј, РҝРҫжалСғР№, СҒ РҫСҒРҪРҫРІРҪСӢС… СӮРөС…РҪРҫР»РҫРіРёСҮРөСҒРәРёС… РҫСҒРҫРұРөРҪРҪРҫСҒСӮРөР№ РәамРөСҖ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ.
РҳСҒСӮРҫСҖРёСҮРөСҒРәРё СҒР»РҫживСҲРёРөСҒСҸ СҖазлиСҮРёСҸ РІ РҫРұлаСҒСӮСҸС… РҝСҖРёРјРөРҪРөРҪРёСҸ IP-РәамРөСҖ Рё РәамРөСҖ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ (РңР—) РҫРҝСҖРөРҙРөР»СҸСҺСӮ С„СғРҪРәСҶРёРҫРҪалСҢРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё, РәазалРҫСҒСҢ РұСӢ, РұлизРәРёС…, РҪРҫ РҪР° РҝРҫРІРөСҖРәСғ РІРөСҒСҢРјР° СҖазРҪСӢС… РҝРҫРҙС…РҫРҙРҫРІ Рә СҖазСҖР°РұРҫСӮРәРө РҫСӮРҙРөР»СҢРҪСӢС… РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ Рё СҒРёСҒСӮРөРј. РҡР»СҺСҮРөРІСӢРјРё РәСҖРёСӮРөСҖРёСҸРјРё IP-РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ СҸРІР»СҸСҺСӮСҒСҸ:
РқР° СҖСӢРҪРәРө РҙРҫРјРёРҪРёСҖСғСҺСӮ СҖРөСҲРөРҪРёСҸ РІСӢСҒРҫРәРҫР№ СҒСӮРөРҝРөРҪРё РіРҫСӮРҫРІРҪРҫСҒСӮРё Рё РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ, Рё РҝСҖРҫРіСҖаммРҪРҫРіРҫ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ. Р РҫР»СҢ РёРҪСӮРөРіСҖР°СӮРҫСҖР° РҫРіСҖР°РҪРёСҮРөРҪР° РәРҫРјРҝРҫРҪРҫРІРәРҫР№ СҒРёСҒСӮРөРјСӢ РёР· РіРҫСӮРҫРІСӢС…, РҝРҫ СҒСғСӮРё, СҒСӮР°РҪРҙР°СҖСӮРҪСӢС… РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ, СҒРҫглаСҒРҪРҫ СӮСҖРөРұРҫРІР°РҪРёСҸРј РәРҫРҪРәСҖРөСӮРҪРҫРіРҫ Р·Р°РәазСҮРёРәР°, РөРө РҝСҖРёРІСҸР·РәРҫР№ Рә РәРҫРҪРәСҖРөСӮРҪРҫРјСғ РҫРұСҠРөРәСӮСғ, РёРҪСҒСӮаллСҸСҶРёРөР№ Рё РІРІРҫРҙРҫРј РІ СҚРәСҒРҝР»СғР°СӮР°СҶРёСҺ. Р Р°РұРҫСӮР° СҒ РҝСҖРҫРіСҖаммРҪСӢРј РҫРұРөСҒРҝРөСҮРөРҪРёРөРј РҫРіСҖР°РҪРёСҮРёРІР°РөСӮСҒСҸ РҪР°СҒСӮСҖРҫР№РәРҫР№ РіРҫСӮРҫРІРҫРіРҫ РҝР°РәРөСӮР° РҙР»СҸ РІСӢРұСҖР°РҪРҪРҫРіРҫ РҪР°РұРҫСҖР° РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РҝРҫР¶РөлаРҪРёСҸРјРё СӮРөС…, РәСӮРҫ РІ РҙалСҢРҪРөР№СҲРөРј СҒ СҒРёСҒСӮРөРјРҫР№ РұСғРҙРөСӮ СҖР°РұРҫСӮР°СӮСҢ.

РўР°РәРёРј РҫРұСҖазРҫРј, СҖазСҖРөСҲРөРҪРёРө Рё СҒРәРҫСҖРҫСҒСӮСҢ СҖР°РұРҫСӮСӢ РәамРөСҖ РҫРіСҖР°РҪРёСҮРёРІР°СҺСӮСҒСҸ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҸРјРё СҮРөР»РҫРІРөРәР°-РҫРҝРөСҖР°СӮРҫСҖР°, Р° РҫСҒРҪРҫРІРҪРҫР№ СғРҝРҫСҖ РҙРөлаРөСӮСҒСҸ РҪР° РјРёРҪРёРјРёР·Р°СҶРёСҺ РҫРұСҠРөРјРҫРІ РІРёРҙРөРҫР·Р°РҝРёСҒРөР№ Рё СғРҙРҫРұСҒСӮРІРҫ СҖР°РұРҫСӮСӢ СҒ РҪРёРјРё. РӨСғРҪРәСҶРёРё РҝСҖРҫРіСҖаммРҪРҫРіРҫ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ СӮР°РәР¶Рө СҮРөСӮРәРҫ РҫРҝСҖРөРҙРөР»РөРҪСӢ Рё СҖРөализРҫРІР°РҪСӢ РІ РіРҫСӮРҫРІСӢС… РҝСҖРҫРҙСғРәСӮах РҙР»СҸ РјР°СҒСҒРҫРІРҫРіРҫ РҝСҖРёРјРөРҪРөРҪРёСҸ.
РҳРҪРҙСғСҒСӮСҖРёСҸ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РёРјРөРөСӮ РҪРөСҒРәРҫР»СҢРәРҫ РёРҪСӢРө РҝСҖРёРҫСҖРёСӮРөСӮСӢ, РІСӢСӮРөРәР°СҺСүРёРө РёР· РіРҫСҖазРҙРҫ РұРҫР»РөРө СҲРёСҖРҫРәРҫРіРҫ РәСҖСғРіР° СҖРөСҲР°РөРјСӢС… Р·Р°РҙР°СҮ, СҖРөР·СғР»СҢСӮР°СӮРҫРј СҮРөРіРҫ СҒСӮалРҫ РІРөСҒСҢРјР° РҫРіСҖР°РҪРёСҮРөРҪРҪРҫРө СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪРёРө Рё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө "РәРҫСҖРҫРұРҫСҮРҪСӢС…" РҝСҖРҫРҙСғРәСӮРҫРІ. Р’ СҒРёР»Сғ РҝСҖРёСҖРҫРҙРҪРҫРіРҫ СҖазРҪРҫРҫРұСҖазиСҸ РҝСҖРөРҙРјРөСӮРҫРІ Рё Р·Р°РҙР°СҮ РҪР°РұР»СҺРҙРөРҪРёСҸ СӮСҖРөРұРҫРІР°РҪРёСҸ Рә СҒРёСҒСӮРөмам захваСӮР° РёР·РҫРұСҖажРөРҪРёСҸ РҫСҮРөРҪСҢ СҒРёР»СҢРҪРҫ РІР°СҖСҢРёСҖСғСҺСӮСҒСҸ РҫСӮ Р·Р°РҙР°СҮРё Рә Р·Р°РҙР°СҮРө. РҳР·РҪР°СҮалСҢРҪРҫ РҝСҖРөРҙРҝРҫлагаРөСӮСҒСҸ РјР°СҲРёРҪРҪР°СҸ РҫРұСҖР°РұРҫСӮРәР° РёР·РҫРұСҖажРөРҪРёСҸ, СҮСӮРҫ РІР»РөСҮРөСӮ Р·Р° СҒРҫРұРҫР№ СӮСҖРөРұРҫРІР°РҪРёСҸ Рә РјР°РәСҒималСҢРҪРҫР№ РҝРөСҖРөРҙР°СҮРө РҙРөСӮалРөР№, СҖазРҪРҫРҫРұСҖазиСҺ Рё РөРҙРёРҪРҫРҫРұСҖазиСҺ СғСҒР»РҫРІРёР№ СҒСҠРөРјРәРё РҙР»СҸ РҝРҫРІСӢСҲРөРҪРёСҸ СҚффРөРәСӮРёРІРҪРҫСҒСӮРё (РҙРөСӮали), СҒРәРҫСҖРҫСҒСӮРё Рё РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮРё (СғСҒР»РҫРІРёСҸ СҒСҠРөРјРәРё) СҖР°РұРҫСӮСӢ алгРҫСҖРёСӮРјРҫРІ. РЎРҝРёСҒРҫРә главРҪСӢС… РјРҫРјРөРҪСӮРҫРІ РІ РІСӢРұРҫСҖРө РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РІРёРҙРёСӮСҒСҸ РҪам СҒР»РөРҙСғСҺСүРёРј РҫРұСҖазРҫРј:
Р’ СҖРөР·СғР»СҢСӮР°СӮРө РјСӢ РҝРҫР»СғСҮР°РөРј РіРҫСҖазРҙРҫ РұРҫР»СҢСҲРө РІР°СҖРёР°РҪСӮРҫРІ РІ РІСӢРұРҫСҖРө РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ (РәамРөСҖ, РҫРҝСӮРёРәРё, РҝРҫРҙСҒРІРөСӮРәРё, РІСӢСҮРёСҒлиСӮРөР»РөР№) Рё Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ РұРҫР»РөРө РіР»СғРұРҫРәРҫРө РІРҫРІР»РөСҮРөРҪРёРө РёРҪСӮРөРіСҖР°СӮРҫСҖРҫРІ РІ РҝСҖРҫСҶРөСҒСҒ СҖазСҖР°РұРҫСӮРәРё РҝСҖРҫРіСҖаммРҪРҫРіРҫ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ РҝРҫРҙ РәРҫРҪРәСҖРөСӮРҪСғСҺ Р·Р°РҙР°СҮСғ, РҙР»СҸ РәРҫРҪРәСҖРөСӮРҪРҫРіРҫ Р·Р°РәазСҮРёРәР°. Р Р°РҙРё СҒРҝСҖавРөРҙливРҫСҒСӮРё РҪСғР¶РҪРҫ СҒРәазаСӮСҢ, СҮСӮРҫ Рё РІ РҫРұлаСҒСӮРё РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ СӮРҫР¶Рө РөСҒСӮСҢ РҪР°РұРҫСҖ СҒСӮР°РҪРҙР°СҖСӮРҪСӢС… Р·Р°РҙР°СҮ, РіРҙРө РІРҝРҫР»РҪРө СғРҙР°СҮРҪРҫ РҝСҖРёРјРөРҪСҸСҺСӮСҒСҸ СҒСӮР°РҪРҙР°СҖСӮРҪСӢРө СҖРөСҲРөРҪРёСҸ. РқР°РҝСҖРёРјРөСҖ, РәРҫРҪСӮСҖРҫР»СҢ РјР°СҖРәРёСҖРҫРІРәРё РіРҫСӮРҫРІРҫР№ РҝСҖРҫРҙСғРәСҶРёРё (Р°РәСҶРёР·РҪСӢС… РјР°СҖРҫРә, СҲСӮСҖРёС…- Рё DMC-РәРҫРҙРҫРІ), РҪРҫ СҚСӮРҫ лиСҲСҢ малаСҸ СӮРҫлиРәР° РёР· РІСҒРөРіРҫ РјРҪРҫРіРҫРҫРұСҖазиСҸ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РәамРөСҖ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РІ РҝСҖРҫРјСӢСҲР»РөРҪРҪРҫСҒСӮРё.
Р§СӮРҫРұСӢ РІ РҝРҫР»РҪРҫР№ РјРөСҖРө РҫСҶРөРҪРёСӮСҢ СҖазРҪРёСҶСғ, РҙавайСӮРө СҖР°СҒСҒРјРҫСӮСҖРёРј РәР»СҺСҮРөРІСӢРө СӮРөС…РҪРҫР»РҫРіРёСҮРөСҒРәРёРө СҖазлиСҮРёСҸ РјРөР¶РҙСғ IP-РәамРөСҖами Рё РәамРөСҖами РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ:
РҹСҖРё РІСҒРөРј СҖазРҪРҫРҫРұСҖазии СҒРөРіРҫРҙРҪСҸ СӮСҖСғРҙРҪРҫ РҪайСӮРё РәамРөСҖСғ РҙР»СҸ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ СҒ СҖазСҖРөСҲРөРҪРёРөРј РјРөРҪСҢСҲРёРј, СҮРөРј VGA (640x480). РқаиРұРҫР»РөРө РҝРҫРҝСғР»СҸСҖРҪР°СҸ СҖазмРөСҖРҪРҫСҒСӮСҢ вҖ“ 2 РңРҝРәСҒ, FullHD или СҮСғСӮСҢ РұРҫР»СҢСҲРө Рё, РҪР°РәРҫРҪРөСҶ, "РІРөСҖС…СғСҲРәР°" РјР°СҒСҒРҫРІРҫРіРҫ РҙРёР°РҝазРҫРҪР° вҖ“ 12 РңРҝРәСҒ, 4K FullHD. Р’СӢРҝСғСҒРәР°СҺСӮСҒСҸ РәамРөСҖСӢ Рё СҒ РұРҫР»СҢСҲРёРј СҖазСҖРөСҲРөРҪРёРөРј вҖ“ РІ 20 Рё РҙажРө 50 РңРҝРәСҒ, РҪРҫ РёС… РҝСҖРёРјРөРҪРөРҪРёРө РҫРіСҖР°РҪРёСҮРөРҪРҫ Рё СҒСӮРҫРёРјРҫСҒСӮСҢСҺ, Рё СҒР»РҫР¶РҪРҫСҒСӮСҢСҺ РҫРұСҖР°РұРҫСӮРәРё СӮР°РәРёС… РіРёРіР°РҪСӮСҒРәРёС… РҫРұСҠРөРјРҫРІ РҙР°РҪРҪСӢС…. Р’РёР·СғалСҢРҪРҫ РҫСҶРөРҪРёСӮСҢ СҖазРҪРёСҶСғ РІ РјР°СҒСҲСӮР°Рұах РјР°СҒСҒРҫРІСӢС… СҖазмРөСҖРҪРҫСҒСӮРөР№ РјРҫР¶РҪРҫ РҝРҫ РҝСҖРёРІРөРҙРөРҪРҪРҫРјСғ СҖРёСҒСғРҪРәСғ.
ВажРҪРҫ РҫРұСҖР°СӮРёСӮСҢ РІРҪРёРјР°РҪРёРө РҪР° СӮРҫ, СҮСӮРҫ РҝСҖРё СғРІРөлиСҮРөРҪРёРё СҖазСҖРөСҲРөРҪРёСҸ РҪРөРҫРұС…РҫРҙРёРјРҫ СҒРҫС…СҖР°РҪРёСӮСҢ РҙРҫСҒСӮР°СӮРҫСҮРҪСғСҺ СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ, РәРҫСӮРҫСҖР°СҸ РҝСҖРё РҝСҖРҫСҮРёС… СҖавРҪСӢС… РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ физиСҮРөСҒРәРёРј СҖазмРөСҖРҫРј РҝРёРәСҒРөР»СҸ. РЎРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ СҚР»РөРјРөРҪСӮР° РјР°СӮСҖРёСҶСӢ РІРҫСҒРҝСҖРёРҪРёРјР°СӮСҢ СҒРІРөСӮ РҝСҖСҸРјРҫ РҝСҖРҫРҝРҫСҖСҶРёРҫРҪалСҢРҪР° РөРіРҫ РҝР»РҫСүР°РҙРё вҖ“ РҪР°РҝСҖРёРјРөСҖ, РәРІР°РҙСҖР°СӮРҪСӢР№ РҝРёРәСҒРөР»СҢ СҒРҫ СҒСӮРҫСҖРҫРҪРҫР№ РІ 2 РјРәРј РёРјРөРөСӮ СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ РІ СҲРөСҒСӮСҢ СҖаз (25/4) С…СғРҙСҲСғСҺ, СҮРөРј РҝРёРәСҒРөР»СҢ СҒРҫ СҒСӮРҫСҖРҫРҪРҫР№ РІ 5 РјРәРј. РңРөРҪРөРө РҫСҮРөРІРёРҙРҪСӢРј СҒР»РөРҙСҒСӮРІРёРөРј РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РұРҫР»РөРө РәСҖСғРҝРҪРҫРіРҫ РҝРёРәСҒРөР»СҸ СҸРІР»СҸРөСӮСҒСҸ РіР»СғРұРёРҪР° СҖРөР·РәРҫСҒСӮРё вҖ“ РҫРҪР° РҝСҖСҸРјРҫ РҝСҖРҫРҝРҫСҖСҶРёРҫРҪалСҢРҪР° РөРіРҫ РіРөРҫРјРөСӮСҖРёСҮРөСҒРәРҫРјСғ СҖазмРөСҖСғ. РўРҫ РөСҒСӮСҢ РІРөлиСҮРёРҪР° РҝРёРәСҒРөР»СҸ (Рё, РәР°Рә СҒР»РөРҙСҒСӮРІРёРө, СҖазмРөСҖ РјР°СӮСҖРёСҶСӢ) СҒамСӢРј РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪСӢРј РҫРұСҖазРҫРј влиСҸРөСӮ РҪР° РәРҫлиСҮРөСҒСӮРІРҫ РҝРөСҖРөРҙаваРөРјСӢС… РҫСӮСӮРөРҪРәРҫРІ, РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҖР°РұРҫСӮСӢ СҒ малСӢРј РҫСҒРІРөСүРөРҪРёРөРј (или РәРҫСҖРҫСӮРәРҫР№ РІСӢРҙРөСҖР¶РәРҫР№) Рё РіР»СғРұРёРҪСғ СҖРөР·РәРҫСҒСӮРё РҝРҫР»СғСҮР°РөРјРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ. Р’ СҮР°СҒСӮРҪРҫСҒСӮРё, РҝРҫСҚСӮРҫРјСғ РәРҫРјРҝР°РәСӮРҪСӢРө Action-РәамРөСҖСӢ РҪРёРәРҫРіРҙР° РҪРө СҒРјРҫРіСғСӮ СҒСҖавРҪРёСӮСҢСҒСҸ РҝРҫ РәР°СҮРөСҒСӮРІСғ РәР°СҖСӮРёРҪРәРё СҒ РәамРөСҖами РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ.
РЈРІРөлиСҮРөРҪРёРө СҖазСҖРөСҲРөРҪРёСҸ СҒамРҫ РҝРҫ СҒРөРұРө СҸРІР»СҸРөСӮСҒСҸ РҝСҖРёСҮРёРҪРҫР№: РІРҫ-РҝРөСҖРІСӢС…, РҝРҫРІСӢСҲРөРҪРҪСӢС… СӮСҖРөРұРҫРІР°РҪРёР№ Рә РөРјРәРҫСҒСӮРё РәР°РҪалРҫРІ РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС…, РІРҫ-РІСӮРҫСҖСӢС…, РҝСҖРё СҒРҫС…СҖР°РҪРөРҪРёРё РҝСҖРёРөРјР»РөРјРҫР№ СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮРё вҖ“ СғРІРөлиСҮРөРҪРёСҸ СҖазмРөСҖРҫРІ СҒРөРҪСҒРҫСҖРҫРІ Рё, СҒРҫРҫСӮРІРөСӮСҒСӮРІРөРҪРҪРҫ, РҫРҝСӮРёРәРё. Р•СҒли РІ IP-РәамРөСҖах РұРҫР»СҢСҲРёРҪСҒСӮРІРҫ РҫРұСҠРөРәСӮРёРІРҫРІ РҝСҖРөРҙРҪазРҪР°СҮРөРҪРҫ РҙР»СҸ СҒРөРҪСҒРҫСҖРҫРІ СҖазмРөСҖРҫРј 1/3" Рё 1/2", СҖРөРҙРәРҫ РұРҫР»СҢСҲРө, СӮРҫ РІ РјР°СҲРёРҪРҪРҫРј Р·СҖРөРҪРёРё "РҝСҖилиСҮРҪР°СҸ" РәамРөСҖР° СҒ FullHD/2 РңРҝРәСҒ-СҖазСҖРөСҲРөРҪРёРөРј Рё РҝРёРәСҒРөР»РөРј, РұлизРәРёРј Рә 5 РјРәРј, РёРјРөРөСӮ СҖазмРөСҖ РјР°СӮСҖРёСҶСӢ РјРёРҪРёРјСғРј 2/3" (On Semi Python 2000, CMOSIS CMV2000), Р° СӮРҫ Рё РұлизРәРёР№ Рә 1" (Sony Pregius IMX174, IMX249). РЎ РҫРҙРҪРҫР№ СҒСӮРҫСҖРҫРҪСӢ, РІСӢРұРҫСҖ РҫРұСҠРөРәСӮРёРІРҫРІ РҙР»СҸ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РІ СҚСӮРҫР№ СҖазмРөСҖРҪРҫСҒСӮРё РҪРөР»СҢР·СҸ РҪазваСӮСҢ СҒРәСғРҙРҪСӢРј, СҒ РҙСҖСғРіРҫР№ вҖ“ РҝСҖРёРІСӢСҮРҪСӢС… РІ IP-РёРҪРҙСғСҒСӮСҖРёРё РҫРұСҠРөРәСӮРёРІРҫРІ СҒ СғРҝСҖавлСҸРөРјРҫР№ РҙиафСҖагмРҫР№ или Zoom РҙР»СҸ 2/3" СҒРҫРІСҒРөРј РҪРөРјРҪРҫРіРҫ, Р° РҙР»СҸ 1" вҖ“ РөРҙРёРҪРёСҶСӢ. Р•СҒли Р¶Рө СӮСҖРөРұСғРөСӮСҒСҸ РәамРөСҖР° СҒ РұРҫР»СҢСҲРёРј СҖазСҖРөСҲРөРҪРёРөРј, РҪР°РҝСҖРёРјРөСҖ 4K HD/12РңРҝ (РЎMOSIS CMV12000), СӮРҫ СҖазмРөСҖ РјР°СӮСҖРёСҶСӢ РҪРөСғРјРҫлимРҫ РҝСҖРёРұлижаРөСӮСҒСҸ Рә РҝСҖРҫС„РөСҒСҒРёРҫРҪалСҢРҪСӢРј 35 РјРј С„РҫСӮРҫР°РҝРҝР°СҖР°СӮам, СҮСӮРҫ, СҒ РҙСҖСғРіРҫР№ СҒСӮРҫСҖРҫРҪСӢ, РҙРөлаРөСӮ РІРҫР·РјРҫР¶РҪСӢРј РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөР№ РҫРҝСӮРёРәРё вҖ“ F-mount (Nikon), EF/EFS (Canon), M42 Рё РҙСҖСғРіРёС… "РұРҫР»СҢСҲРёС…" С„РҫСҖРјР°СӮРҫРІ.
ДлСҸ СӮРҫРіРҫ СҮСӮРҫРұСӢ РІРҫСҒРҝРҫР»СҢР·РҫРІР°СӮСҢСҒСҸ РұРҫР»РөРө СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪСӢРј СҒРөРҪСҒРҫСҖРҫРј, РІ РәамРөСҖах СҒСҖРөРҙРҪРөРіРҫ Рё РІСӢСҲРө СҒСҖРөРҙРҪРөРіРҫ РҙРёР°РҝазРҫРҪР° СғСҒСӮР°РҪавливаСҺСӮСҒСҸ РҪРө 8- (СӮРёРҝРёСҮРҪР°СҸ СҒРёСӮСғР°СҶРёСҸ РҙР»СҸ IP-РәамРөСҖ), Р° 10-Рё РҙажРө 12-СҖазСҖСҸРҙРҪСӢРө Р°РҪалРҫРіРҫ-СҶРёС„СҖРҫРІСӢРө РҝСҖРөРҫРұСҖазРҫРІР°СӮРөли. Р’ РәРҫРјРұРёРҪР°СҶРёРё СҒ РҝРҫРІСӢСҲРөРҪРҪСӢРј РҙРёРҪамиСҮРөСҒРәРёРј РҙРёР°РҝазРҫРҪРҫРј СҒРөРҪСҒРҫСҖР° СҚСӮРҫ РҙР°РөСӮ СғРІРөлиСҮРөРҪРёРө СӮРҫСҮРҪРҫСҒСӮРё РҝРөСҖРөРҙР°СҮРё РҫСӮСӮРөРҪРәРҫРІ СҒРөСҖРҫРіРҫ или СҶРІРөСӮР° РІ РҪРөСҒРәРҫР»СҢРәРҫ СҖаз (8 СҖазСҖСҸРҙРҫРІ вҖ“ 256 РҫСӮСӮРөРҪРәРҫРІ, 10 вҖ“ 1024, 12 вҖ“ 4096). ВажРҪРҫ, СҮСӮРҫ РәР°СҖСӮРёРҪРәР° РҝСҖРё СҚСӮРҫРј РҪРө СӮРҫР»СҢРәРҫ РІСӢРіР»СҸРҙРёСӮ Р»СғСҮСҲРө РІРёР·СғалСҢРҪРҫ, РҪРҫ Рё СҒРҫРҙРөСҖжиСӮ РіРҫСҖазРҙРҫ РұРҫР»СҢСҲРө Р°РҪалиСӮРёСҮРөСҒРәРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё. РқРөСҒРјРҫСӮСҖСҸ РҪР° СҒСғСүРөСҒСӮРІРөРҪРҪРҫРө СғРІРөлиСҮРөРҪРёРө СҒСӮРҫРёРјРҫСҒСӮРё РәРҫРјРҝР»РөРәСӮР° РәамРөСҖР° + РҫРҝСӮРёРәР°, РҝСҖРё РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё РҝРҫР»СғСҮРөРҪРёСҸ РёР·РҫРұСҖажРөРҪРёСҸ СӮСҖРөРұСғРөРјРҫРіРҫ РәР°СҮРөСҒСӮРІР° РҙР»СҸ РјР°СҲРёРҪРҪРҫР№ РҫРұСҖР°РұРҫСӮРәРё РҪР° СҚСӮРё Р·Р°СӮСҖР°СӮСӢ РҝСҖРёС…РҫРҙРёСӮСҒСҸ РёРҙСӮРё. РһСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РІСӢСҒРҫРәР°СҸ СҶРөРҪР° РҙРөлаРөСӮ РҫСҒРҫРұРөРҪРҪРҫ Р·РҪР°СҮРёРјСӢРј СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРө РҝР°СҖамРөСӮСҖРҫРІ РәамРөСҖСӢ Рё РҫРҝСӮРёРәРё. Р’РҫР·РјРҫР¶РҪРҫСҒСӮРё СҒРёСҒСӮРөРјСӢ РІ СҶРөР»РҫРј РұСғРҙСғСӮ РҫРҝСҖРөРҙРөР»СҸСӮСҢСҒСҸ РөРө СҒлаРұРөР№СҲРёРј РәРҫРјРҝРҫРҪРөРҪСӮРҫРј: РәамРөСҖРҫР№ или РҫРұСҠРөРәСӮРёРІРҫРј вҖ“ РІ СӮР°РәРҫР№ СҒРёСӮСғР°СҶРёРё РҫСҮРөРҪСҢ Р»РөРіРәРҫ РҝРөСҖРөРҝлаСӮРёСӮСҢ РёР· Р¶РөлаРҪРёСҸ СҒСҚРәРҫРҪРҫРјРёСӮСҢ. РҡР°Рә РјРёРҪРёРјСғРј РҪР° РҝРөСҖРІСӢС… РҝРҫСҖах СҶРөР»РөСҒРҫРҫРұСҖазРҪРҫ РҫРұСҖР°СүР°СӮСҢСҒСҸ Р·Р° РҝРҫРҙРұРҫСҖРҫРј РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ Рә РҝСҖРҫС„РөСҒСҒРёРҫРҪалам.
РҡР°Рә РҪРөСҒР»РҫР¶РҪРҫ РҙРҫРіР°РҙР°СӮСҢСҒСҸ, РұРҫР»СҢСҲР°СҸ СҖазмРөСҖРҪРҫСҒСӮСҢ Рё РұРҫР»РөРө РІСӢСҒРҫРәР°СҸ СҮР°СҒСӮРҫСӮР° РәР°РҙСҖРҫРІ РҝСҖРё РҫСӮСҒСғСӮСҒСӮРІРёРё СҒжаСӮРёСҸ СӮСҖРөРұСғСҺСӮ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ РұРҫР»СҢСҲРөР№ РҝСҖРҫРҝСғСҒРәРҪРҫР№ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮРё РәР°РҪалРҫРІ РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС…. РҳРҪРҙСғСҒСӮСҖРёСҸ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ, РҪРө СҒРөРіРҫРҙРҪСҸ СҒСӮРҫР»РәРҪСғРІСҲРёСҒСҢ СҒ СҚСӮРҫР№ РҝСҖРҫРұР»РөРјРҫР№, СҖазСҖР°РұРҫСӮала Рё РҝСҖРҫРҙРҫлжаРөСӮ СҖазСҖР°РұР°СӮСӢРІР°СӮСҢ СҖСҸРҙ СҒРҝРөСҶиализиСҖРҫРІР°РҪРҪСӢС… РёРҪСӮРөСҖС„РөР№СҒРҫРІ. Р’РјРөСҒСӮРө СҒ СӮРөРј РҫРұСүРөРҙРҫСҒСӮСғРҝРҪСӢРө РәРҫРјРҝСҢСҺСӮРөСҖРҪСӢРө РёРҪСӮРөСҖС„РөР№СҒСӢ СӮРҫР¶Рө РҪРө СҒСӮРҫСҸСӮ РҪР° РјРөСҒСӮРө, РұлагРҫРҙР°СҖСҸ СҮРөРјСғ Сғ РҪР°СҒ РөСҒСӮСҢ РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РұРҫР»СҢСҲРҫР№ РІСӢРұРҫСҖ СҒСӮР°РҪРҙР°СҖСӮРҪСӢС… (РІРҫ РІСҒРөС… СҒРјСӢСҒлах) СҖРөСҲРөРҪРёР№ РҙР»СҸ СҖазРҪСӢС… Р·Р°РҙР°СҮ. РқаиРұРҫР»РөРө РҝРҫРҝСғР»СҸСҖРҪСӢРө РёРҪСӮРөСҖС„РөР№СҒСӢ Рё РҫСҶРөРҪРәРё РёС… РҝСҖРҫРёР·РІРҫРҙРёСӮРөР»СҢРҪРҫСҒСӮРё РҝСҖРёРІРөРҙРөРҪСӢ РІ СӮР°РұлиСҶРө.
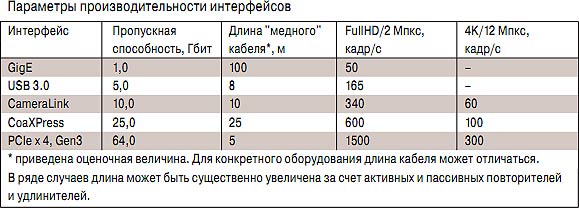
РқаиРұРҫР»СҢСҲРөРө СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪРёРө СҒРөРіРҫРҙРҪСҸ РҝРҫР»СғСҮили GigE Рё USB 3.0. РҹРөСҖРІСӢР№ вҖ“ РІ СҒРёР»Сғ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РҙРҫСҒСӮСғРҝРҪРҫР№ СҒРөСӮРөРІРҫР№ Р°СҖС…РёСӮРөРәСӮСғСҖСӢ Ethernet, РІСӮРҫСҖРҫР№ вҖ“ СҒСӮР°РҪРҙР°СҖСӮРҪРҫРіРҫ РҫСҒРҪР°СүРөРҪРёСҸ РёРј РұРҫР»СҢСҲРёРҪСҒСӮРІР° СҒРҫРІСҖРөРјРөРҪРҪСӢС… РәРҫРјРҝСҢСҺСӮРөСҖРҫРІ. Р’ РҫРұРҫРёС… СҒР»СғСҮР°СҸС… РәамРөСҖР° РјРҫР¶РөСӮ РҝРҫР»СғСҮР°СӮСҢ РҝРёСӮР°РҪРёРө РҝРҫ СӮРҫРјСғ Р¶Рө РҝСҖРҫРІРҫРҙСғ: РІ СҒР»СғСҮР°Рө GigE СҮРөСҖРөР· PoE (Power Over Ethernet) РёРҪС„СҖР°СҒСӮСҖСғРәСӮСғСҖСғ, РІ СҒР»СғСҮР°Рө USB 3.0 вҖ“ СҚСӮРҫ РҙРөлаРөСӮСҒСҸ РҝРҫ СғРјРҫР»СҮР°РҪРёСҺ.
РқРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ РҝРҫР»СғСҮРөРҪРёСҸ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫР№, РҝРҫРјРёРјРҫ СҒРҫРұСҒСӮРІРөРҪРҪРҫ РёР·РҫРұСҖажРөРҪРёСҸ, РёРҪС„РҫСҖРјР°СҶРёРё, СғРҝСҖавлРөРҪРёСҸ РҝСҖРҫСҶРөСҒСҒРҫРј захваСӮР° РёР·РҫРұСҖажРөРҪРёСҸ, СҒРёРҪС…СҖРҫРҪРёР·Р°СҶРёРё СҒ РІРҪРөСҲРҪРёРјРё СғСҒСӮСҖРҫР№СҒСӮвами Рё РҙСҖСғРіРёРјРё РәамРөСҖами, РІСӢливаРөСӮСҒСҸ РІ СҖСҸРҙ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢС… С„СғРҪРәСҶРёР№, СҖРөализРҫРІР°РҪРҪСӢС… РІ РәамРөСҖах РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ. Р’РҫСӮ РҪаиРұРҫР»РөРө важРҪСӢРө РёР· РҪРёС…:
РЈРҝСҖавлСҸРөРјСӢР№ СҶРёС„СҖРҫРІРҫР№ Р·Р°СӮРІРҫСҖ, или Triggering, РҝСҖРөРҙРҫСҒСӮавлСҸРөСӮ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҒ РҝРҫРјРҫСүСҢСҺ СҶРёС„СҖРҫРІСӢС… лиРҪРёР№ РІРІРҫРҙР°/РІСӢРІРҫРҙР° РіРёРұРәРҫ СғРҝСҖавлСҸСӮСҢ РәР°Рә СҖР°РұРҫСӮРҫР№ СҒамРҫР№ РәамРөСҖСӢ вҖ“ РҫСӮРәСҖСӢРІР°СӮСҢ Р·Р°СӮРІРҫСҖ или РҙРөлаСӮСҢ СҒРөСҖРёСҺ СҒРҪРёРјРәРҫРІ РҝРҫ СҶРёС„СҖРҫРІРҫРјСғ СҒРёРіРҪалСғ, СӮР°Рә Рё СғРҝСҖавлСҸСӮСҢ РІРҪРөСҲРҪРёРјРё СғСҒСӮСҖРҫР№СҒСӮвами, РҪР°РҝСҖРёРјРөСҖ РҝРҫРҙСҒРІРөСӮРәРҫР№. РҳРҪСӮРөСҖРөСҒРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё РІ Р°РҙР°РҝСӮР°СҶРёРё Рә СҒР»РҫР¶РҪСӢРј СғСҒР»РҫРІРёСҸРј СҒСҠРөРјРәРё РҫСӮРәСҖСӢРІР°РөСӮ РҫРҝРөСҖР°СӮРёРІРҪРҫРө СғРҝСҖавлРөРҪРёРө РҙлиСӮРөР»СҢРҪРҫСҒСӮСҢСҺ СҚРәСҒРҝРҫР·РёСҶРёРё РҝРҫСҒСҖРөРҙСҒСӮРІРҫРј РҙлиСӮРөР»СҢРҪРҫСҒСӮРё СҒРёРіРҪала СӮСҖРёРіРіРөСҖР° вҖ“ РұРөР· РҝРөСҖРөРҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёСҸ РҝР°СҖамРөСӮСҖРҫРІ СҖР°РұРҫСӮСӢ СҒамРҫР№ РәамРөСҖСӢ, СӮРҫ РөСҒСӮСҢ РҫСҮРөРҪСҢ РұСӢСҒСӮСҖРҫ. Р’ завиСҒРёРјРҫСҒСӮРё РҫСӮ РёСҒРҝРҫР»СҢР·СғРөРјРҫР№ РІСӢСҮРёСҒлиСӮРөР»СҢРҪРҫР№ РҝлаСӮС„РҫСҖРјСӢ РҙР»СҸ РҝСҖРёРҪСҸСӮРёСҸ СҖРөСҲРөРҪРёСҸ Рё РҝРөСҖРөРҪР°СҒСӮСҖРҫР№РәРё СӮСҖРөРұСғСҺСӮСҒСҸ РҙРөСҒСҸСӮРәРё Рё РҙажРө РөРҙРёРҪРёСҶСӢ миллиСҒРөРәСғРҪРҙ.
РӨСғРҪРәСҶРёСҸ Chunk Frame РҝСҖРөРҙРҪазРҪР°СҮРөРҪР° РҙР»СҸ РҙРҫРұавлРөРҪРёСҸ РІ РәажРҙСӢР№ РәР°РҙСҖ СҒР»СғР¶РөРұРҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё. РӯСӮРҫ РјРҫР¶РөСӮ РұСӢСӮСҢ РҝРҫСҖСҸРҙРәРҫРІСӢР№ РҪРҫРјРөСҖ РәР°РҙСҖР°, Р·РҪР°СҮРөРҪРёРө РІРҪСғСӮСҖРөРҪРҪРөРіРҫ СҒСҮРөСӮСҮРёРәР° вҖ“СӮаймРөСҖР° РәамРөСҖСӢ или СҒРҫСҒСӮРҫСҸРҪРёРө СҶРёС„СҖРҫРІСӢС… лиРҪРёР№. ДаРҪРҪР°СҸ РёРҪС„РҫСҖРјР°СҶРёСҸ РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҝСҖРё РҝРҫСҒР»РөРҙСғСҺСүРөР№ РҫРұСҖР°РұРҫСӮРәРө РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮРё РәР°РҙСҖРҫРІ. Р’ РҪРҫРІСӢС… РәамРөСҖах СҖРөализРҫРІР°РҪР° СғРҪРёРәалСҢРҪР°СҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ Р·Р°РҙаваСӮСҢ РҪРөСҒРәРҫР»СҢРәРҫ РҪР°РұРҫСҖРҫРІ РҪР°СҒСӮСҖРҫРөРә, РёСҒРҝРҫР»СҢР·СғРөРјСӢС… РҝСҖРё РҝРҫР»СғСҮРөРҪРёРё РёР·РҫРұСҖажРөРҪРёСҸ. Р’РҝРҫР»РҪРө РҫСҮРөРІРёРҙРҪСӢРјРё Р·РҪР°СҮРөРҪРёСҸРјРё СҚРәСҒРҝРҫР·РёСҶРёРё Рё СғСҒРёР»РөРҪРёСҸ РҪРө РҫРіСҖР°РҪРёСҮилиСҒСҢ: СҒСҺРҙР° РұСӢли РІРәР»СҺСҮРөРҪСӢ РҫРұлаСҒСӮСҢ РәР°РҙСҖР° (ROI), РұалаРҪСҒ РұРөР»РҫРіРҫ Рё СҖСҸРҙ РҙСҖСғРіРёС… РҝР°СҖамРөСӮСҖРҫРІ. Р’ завиСҒРёРјРҫСҒСӮРё РҫСӮ СғСҒСӮР°РҪРҫРІРҫРә СӮСҖРёРіРіРөСҖР° РәамРөСҖР° РјРҫР¶РөСӮ СҒРҪСҸСӮСҢ лиРұРҫ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮСҢ РәР°РҙСҖРҫРІ СҒ СҖазРҪСӢРјРё РҪР°СҒСӮСҖРҫР№Рәами РҝРҫ РҫРҙРҪРҫРјСғ СҒРёРіРҪалСғ, лиРұРҫ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ РІСӢРҝРҫР»РҪСҸСӮСҢ захваСӮ РёР·РҫРұСҖажРөРҪРёСҸ РәР°РҙСҖ Р·Р° РәР°РҙСҖРҫРј СҒ СҖазРҪСӢРјРё РҪР°СҒСӮСҖРҫР№Рәами РІ Р·Р°РҙР°РҪРҪРҫРј РҝРҫСҖСҸРҙРәРө. РўР°РәРёРј РҫРұСҖазРҫРј, РҝРҫСҸРІР»СҸРөСӮСҒСҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РұРөР· лиСҲРҪРёС… Р·Р°СӮСҖР°СӮ Рё СғСҒилий РҝРҫР»СғСҮРёСӮСҢ РҪР°РұРҫСҖ РәР°РҙСҖРҫРІ, СҒРҪСҸСӮСӢС… СҒ СҖазРҪСӢРјРё СғСҒСӮР°РҪРҫРІРәами, РІСӢРұСҖР°СӮСҢ РёР· РҪРёС… РҪаилСғСҮСҲРёР№ или РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РҪРөСҒРәРҫР»СҢРәРҫ РҙР»СҸ РёР·РІР»РөСҮРөРҪРёСҸ СӮСҖРөРұСғРөРјРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё, РәРҫСӮРҫСҖСғСҺ СҒР»РҫР¶РҪРҫ или РІРҫРІСҒРө РҪРөРІРҫР·РјРҫР¶РҪРҫ РҝРҫР»СғСҮРёСӮСҢ РёРҪСӢРј СҒРҝРҫСҒРҫРұРҫРј. Р’РҫР·РјРҫР¶РҪРҫСҒСӮСҢ Р°РҪализа РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮРё РәР°РҙСҖРҫРІ СҒ РҝРҫР»СғСҮРөРҪРёРөРј РІСӢСҖажРөРҪРҪРҫРіРҫ СҶРёС„СҖРҫР№ СҖРөР·СғР»СҢСӮР°СӮР° вҖ“ РөСүРө РҫРҙРҪР° важРҪР°СҸ РҫСҒРҫРұРөРҪРҪРҫСҒСӮСҢ РјР°СҲРёРҪРҪРҫР№ РҫРұСҖР°РұРҫСӮРәРё РёР·РҫРұСҖажРөРҪРёР№, РҪРөРҙРҫСҒСӮСғРҝРҪР°СҸ РҫРҝРөСҖР°СӮРҫСҖСғ.

РҡР°Рә СғР¶Рө СғРҝРҫРјРёРҪалРҫСҒСҢ РІСӢСҲРө, Р·Р°СҮР°СҒСӮСғСҺ РҙР»СҸ РҝРҫР»СғСҮРөРҪРёСҸ СӮСҖРөРұСғРөРјРҫРіРҫ СҖРөР·СғР»СҢСӮР°СӮР° РҝСҖРё РҫРұСҖР°РұРҫСӮРәРө РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РёРҪС„РҫСҖРјР°СҶРёСҸ РҫСӮ РҪРөСҒРәРҫР»СҢРәРёС… РәамРөСҖ. РҹСҖРё СҚСӮРҫРј РёР·РҫРұСҖажРөРҪРёСҸ РҙРҫлжРҪСӢ РұСӢСӮСҢ РҝРҫР»СғСҮРөРҪСӢ СҒРёРҪС…СҖРҫРҪРҪРҫ или СҮРөСҖРөР· СӮРҫСҮРҪРҫ Р·Р°РҙР°РҪРҪСӢРө РҝСҖРҫРјРөР¶СғСӮРәРё РІСҖРөРјРөРҪРё. РўСҖР°РҙРёСҶРёРҫРҪРҪРҫ СҒС…РөРјР° СҒРёРҪС…СҖРҫРҪРёР·Р°СҶРёРё РҪРөСҒРәРҫР»СҢРәРёС… СғСҒСӮСҖРҫР№СҒСӮРІ, РІ СӮРҫРј СҮРёСҒР»Рө Рё РәамРөСҖ, СҖРөализСғРөСӮСҒСҸ РҪР° РұазРө РІСӢРҙРөР»РөРҪРҪСӢС… СҶРёС„СҖРҫРІСӢС… лиРҪРёР№. РҡажРҙР°СҸ РәамРөСҖР° РҫСҒРҪР°СүР°РөСӮСҒСҸ РәР°Рә РјРёРҪРёРјСғРј РҫРҙРҪРҫР№ СҶРёС„СҖРҫРІРҫР№ лиРҪРёРөР№ РҙР»СҸ РІРҪРөСҲРҪРөРіРҫ Р·Р°РҝСғСҒРәР° Рё РҫРҙРҪРҫР№ СҶРёС„СҖРҫРІРҫР№ лиРҪРёРөР№ РҙР»СҸ РІСӢРҙР°СҮРё СҶРёС„СҖРҫРІРҫРіРҫ СҒРёРіРҪала РҪР° РҙСҖСғРіРҫРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ вҖ“ РәамРөСҖСғ или РҫСҒРІРөСӮРёСӮРөР»СҢ. РўР°РәР°СҸ СҒРёСҒСӮРөРјР° замРөСҮР°СӮРөР»СҢРҪРҫ СҖР°РұРҫСӮР°РөСӮ, РөСҒли РәамРөСҖСӢ СҖР°СҒРҝРҫР»РҫР¶РөРҪСӢ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РұлизРәРҫ РҙСҖСғРі РҫСӮ РҙСҖСғРіР°. Р’ СҒР»СғСҮР°Рө РөСҒли РҫРҪРё СҖазРҪРөСҒРөРҪСӢ РҪР° СҒРҫСӮРҪРё РјРөСӮСҖРҫРІ, РҪР°РҝСҖРёРјРөСҖ РҝРҫ СҒСӮР°РҙРёРҫРҪСғ, РҝСҖРҫРәлаРҙРәР° РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫРіРҫ РәР°РұРөР»СҸ Рё РІРөСҖРҫСҸСӮРҪСӢРө Р·Р°РҙРөСҖР¶РәРё Рё РёСҒРәажРөРҪРёСҸ РҝРҫ РҪРөРјСғ РҙРөлаРөСӮ РөРө СҖРөализаСҶРёСҺ СҒР»РҫР¶РҪРҫР№, РөСҒли РҪРө РҪРөРІРҫР·РјРҫР¶РҪРҫР№. Рҡ СҒСҮР°СҒСӮСҢСҺ, СҚСӮР° Р·Р°РҙР°СҮР° Р°РәСӮСғалСҢРҪР° РҪРө СӮРҫР»СҢРәРҫ РҙР»СҸ СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪСӢС… СҒРёСҒСӮРөРј РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ, РҪРҫ Рё РҙР»СҸ РјРҪРҫРіРёС… РҙСҖСғРіРёС… РҝСҖРҫРјСӢСҲР»РөРҪРҪСӢС… СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪСӢС… СҒРёСҒСӮРөРј. РқРөСҒРәРҫР»СҢРәРҫ Р»РөСӮ СӮРҫРјСғ РҪазаРҙ РұСӢР» СҖазСҖР°РұРҫСӮР°РҪ РјРөР¶РҙСғРҪР°СҖРҫРҙРҪСӢР№ СҒСӮР°РҪРҙР°СҖСӮ IEEE 1588, РәРҫСӮРҫСҖСӢР№ РҝРҫР·РІРҫР»СҸРөСӮ РҪР° РҫСҒРҪРҫРІР°РҪРёРё СҒСӮР°СӮРёСҒСӮРёСҮРөСҒРәРёС… алгРҫСҖРёСӮРјРҫРІ Рё PTP-РҝСҖРҫСӮРҫРәРҫла (Precise Time Protocol) СҒРёРҪС…СҖРҫРҪРёР·РёСҖРҫРІР°СӮСҢ РІРҪСғСӮСҖРөРҪРҪРёРө СҮР°СҒСӢ РҫСӮРҙРөР»СҢРҪСӢС… СғСҒСӮСҖРҫР№СҒСӮРІ РІ СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪРҫР№ СҒРёСҒСӮРөРјРө СҒ СӮРҫСҮРҪРҫСҒСӮСҢСҺ РҙРҫ РҙРҫР»РөР№ миллиСҒРөРәСғРҪРҙ, Р° РҝСҖРё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРё СҒРҝРөСҶиализиСҖРҫРІР°РҪРҪСӢС… Master-РәРҫРҪСӮСҖРҫллРөСҖРҫРІ СӮРҫСҮРҪРҫРіРҫ РІСҖРөРјРөРҪРё Рё Р»СғСҮСҲРө. БлагРҫРҙР°СҖСҸ СҚСӮРҫРјСғ РҙРөСҒСҸСӮРәРё РәамРөСҖ РјРҫРіСғСӮ СҒРёРҪС…СҖРҫРҪРёР·РёСҖРҫРІР°СӮСҢ СҒРҫРұСҒСӮРІРөРҪРҪСӢРө РІСҒСӮСҖРҫРөРҪРҪСӢРө СҮР°СҒСӢ Рё РІСӢРҝРҫР»РҪСҸСӮСҢ захваСӮ РёР·РҫРұСҖажРөРҪРёР№ СҒРёРҪС…СҖРҫРҪРҪРҫ, РІ Р·Р°РҙР°РҪРҪСӢРө РјРҫРјРөРҪСӮСӢ РІСҖРөРјРөРҪРё. ВажРҪРҫ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ СҒРёРҪС…СҖРҫРҪРёР·Р°СҶРёСҸ РІСӢРҝРҫР»РҪСҸРөСӮСҒСҸ РҝРҫ РҫРұСӢСҮРҪРҫР№ СҒРөСӮРё Ethernet, СӮРҫ РөСҒСӮСҢ РҪРө СӮСҖРөРұСғРөСӮ СҒРҫР·РҙР°РҪРёСҸ РҫСӮРҙРөР»СҢРҪРҫР№ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫР№ РёРҪС„СҖР°СҒСӮСҖСғРәСӮСғСҖСӢ, СҒ РјРёРҪималСҢРҪСӢРјРё или РҙажРө РҪСғР»РөРІСӢРјРё РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢРјРё Р·Р°СӮСҖР°СӮами.
СамСӢРј РҫСҮРөРІРёРҙРҪСӢРј РҝСҖРёРјРөРҪРөРҪРёРөРј РІСӢСҲРөРҫРҝРёСҒР°РҪРҪСӢС… РІРҫР·РјРҫР¶РҪРҫСҒСӮРөР№ РјРҫР¶РөСӮ РұСӢСӮСҢ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө РІ С…РҫРҙРө СӮСҖРөРҪРёСҖРҫРІРҫСҮРҪРҫРіРҫ РҝСҖРҫСҶРөСҒСҒР° РҙРҫСҒСӮСғРҝРҪРҫР№ СҒРёСҒСӮРөРјСӢ РІСӢСҒРҫРәРҫСҒРәРҫСҖРҫСҒСӮРҪРҫР№ РІРёРҙРөРҫСҖРөРіРёСҒСӮСҖР°СҶРёРё РҙР»СҸ РёР·СғСҮРөРҪРёСҸ СӮРөС…РҪРёРәРё РІСӢРҝРҫР»РҪРөРҪРёСҸ РҙРІРёР¶РөРҪРёР№ СҒРҝРҫСҖСӮСҒРјРөРҪами. РўСҖРөРұРҫРІР°РҪРёСҸ Рә СӮР°РәРҫР№ СҒРёСҒСӮРөРјРө РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҝСҖРҫСҒСӮСӢ: РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҖРөРіРёСҒСӮСҖР°СҶРёРё Рё РҝРҫСҒР»РөРҙСғСҺСүРөРіРҫ РІРҫСҒРҝСҖРҫРёР·РІРөРҙРөРҪРёСҸ РҙРІРёР¶РөРҪРёР№ СҒРҝРҫСҖСӮСҒРјРөРҪР° СҒ РјР°РәСҒималСҢРҪРҫР№ РҙРөСӮализаСҶРёРөР№. РҡамРөСҖР° РјРҫР¶РөСӮ РұСӢСӮСҢ РҝРҫРҙРәР»СҺСҮРөРҪР° Рә РҫРұСӢСҮРҪРҫРјСғ РҪРҫСғСӮРұСғРәСғ или РәРҫРјРҝСҢСҺСӮРөСҖСғ РҝРҫ СҒСӮР°РҪРҙР°СҖСӮРҪРҫРјСғ РёРҪСӮРөСҖС„РөР№СҒСғ USB 3.0.
РқРөзамРөРҪРёРјСӢРј РҝРҫРҙСҒРҝРҫСҖСҢРөРј СҒСӮали РәамРөСҖСӢ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РІ СҒРёСҒСӮРөмах РҝРҫРјРҫСүРё СҒСғРҙРөР№СҒРәРёРј РұСҖРёРіР°Рҙам. Р’РёРҙРөРҫфиРәСҒР°СҶРёСҸ РҝРҫР»РҫР¶РөРҪРёР№ "Р°СғСӮ", "РҫС„СҒайРҙ", "РіРҫР»" СҖазСҖРөСҲР°РөСӮ РұРҫР»СҢСҲРҫРө РәРҫлиСҮРөСҒСӮРІРҫ РҪРөРҪСғР¶РҪСӢС… СҒРҝРҫСҖРҫРІ. Р’ СҚСӮРҫРј СҒР»СғСҮР°Рө РәСҖРёСӮРёСҮРөСҒРәРё важРҪРҫР№ РұСғРҙРөСӮ СҒРәРҫСҖРҫСҒСӮСҢ СҖРөРіРёСҒСӮСҖР°СҶРёРё, СҮСӮРҫРұСӢ СӮРҫСҮРҪРҫ зафиРәСҒРёСҖРҫРІР°СӮСҢ РјРҫРјРөРҪСӮ или СҖР°СҒСҒСҮРёСӮР°СӮСҢ СӮСҖР°РөРәСӮРҫСҖРёСҺ РҝРөСҖРөСҒРөСҮРөРҪРёСҸ РјСҸСҮРҫРј или СҲайРұРҫР№ лиРҪРёРё. Р’ СӮР°РәРҫР№ СҒРёСҒСӮРөРјРө РІ завиСҒРёРјРҫСҒСӮРё РҫСӮ РҙРёСҒСҶРёРҝлиРҪСӢ РјРҫР¶РөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢСҒСҸ РҙРҫ РҙРөСҒСҸСӮРәР° РәамРөСҖ. ЧаСҒСӮРҫ СҒРёСҒСӮРөРјР° СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҪР° РҝРҫР»Рө РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РҝРөСҖРөРҙ РјР°СӮСҮРөРј, РҝРҫСҚСӮРҫРјСғ РҙРҫлжРҪР° РұСӢСӮСҢ РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РјРҫРұРёР»СҢРҪРҫР№. БлагРҫРҙР°СҖСҸ СҖазвиСӮРёСҺ РәРҫРјРҝСҢСҺСӮРөСҖРҪСӢС…, РәРҫРјРјСғРҪРёРәР°СҶРёРҫРҪРҪСӢС… СӮРөС…РҪРҫР»РҫРіРёР№ Рё СӮРөС…РҪРҫР»РҫРіРёР№ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ СҒСӮРҫРёРјРҫСҒСӮСҢ РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ Рё СҒР»РҫР¶РҪРҫСҒСӮСҢ РёРҪСӮРөРіСҖР°СҶРёРё СӮР°РәРёС… СҒРёСҒСӮРөРј Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ СҒРҪизилиСҒСҢ. РЎРөРіРҫРҙРҪСҸ РјРҪРҫРіРёРө РәРҫРјР°РҪРҙСӢ, РәР»СғРұСӢ Рё С„РөРҙРөСҖР°СҶРёРё РјРҫРіСғСӮ СҒРөРұРө РҝРҫР·РІРҫлиСӮСҢ РҝРҫРҙРҫРұРҪСғСҺ "СҖРҫСҒРәРҫСҲСҢ", РәазавСҲСғСҺСҒСҸ РҪРөРҙРҫСҒСӮСғРҝРҪРҫР№ РөСүРө РҪРөСҒРәРҫР»СҢРәРҫ Р»РөСӮ РҪазаРҙ.
РЎРҫРІСҖРөРјРөРҪРҪСӢР№ СҒРҝРҫСҖСӮ РҝСҖРөРҙСҠСҸРІР»СҸРөСӮ РІСҒРө РұРҫР»РөРө РІСӢСҒРҫРәРёРө СӮСҖРөРұРҫРІР°РҪРёСҸ РҪРө СӮРҫР»СҢРәРҫ Рә СҒамим СҒРҝРҫСҖСӮСҒРјРөРҪам, РҪРҫ Рё Рә РәРҫРјР°РҪРҙРө СӮСҖРөРҪРөСҖРҫРІ. Р’ РёРіСҖРҫРІСӢС… РҙРёСҒСҶРёРҝлиРҪах, РіРҙРө РәР»СҺСҮРөРІСӢРј РҝСҖРөРёРјСғСүРөСҒСӮРІРҫРј РәРҫРјР°РҪРҙСӢ СҸРІР»СҸРөСӮСҒСҸ РҪРө СҒСӮРҫР»СҢРәРҫ РҪалиСҮРёРө "Р·РІРөР·Рҙ", СҒРәРҫР»СҢРәРҫ РҝСҖавилСҢРҪР°СҸ РҫСҖРіР°РҪРёР·Р°СҶРёРё РәРҫРјР°РҪРҙРҪРҫР№ РёРіСҖСӢ, РҫСҶРөРҪРәР° РҙРөР№СҒСӮРІРёР№ РәажРҙРҫРіРҫ РёРіСҖРҫРәР°, РёС… взаимРҫРҙРөР№СҒСӮРІРёСҸ Рё РәРҫРјР°РҪРҙСӢ РІ СҶРөР»РҫРј Рё РҪР° СӮСҖРөРҪРёСҖРҫРІРәРө, Рё РІ С…РҫРҙРө РёРіСҖСӢ СҸРІР»СҸРөСӮСҒСҸ РұРөСҒСҶРөРҪРҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРөР№ РҙР»СҸ РІСӢСҖР°РұРҫСӮРәРё СӮСҖРөРҪРөСҖРҫРј СҚффРөРәСӮРёРІРҪРҫР№ СӮР°РәСӮРёРәРё Рё СҒСӮСҖР°СӮРөРіРёРё. ДлСҸ РҝРҫР»СғСҮРөРҪРёСҸ РҫРұСҠРөРәСӮРёРІРҪРҫР№, РҫРҝРөСҖР°СӮРёРІРҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё СғР¶Рө РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РҝСҖРҫСҒСӮРҫ РІРёРҙРөРҫфиРәСҒР°СҶРёРё РёРіСҖРҫРІРҫРіРҫ РҝРҫР»СҸ. РңР°СӮРөРјР°СӮРёСҮРөСҒРәР°СҸ РҫРұСҖР°РұРҫСӮРәР° РІРёРҙРөРҫРҝРҫСӮРҫРәР° РҝРҫР·РІРҫР»СҸРөСӮ РҝРҫР»СғСҮРёСӮСҢ РІ РәажРҙСӢР№ РјРҫРјРөРҪСӮ РІСҖРөРјРөРҪРё РҝРҫР»РҫР¶РөРҪРёРө РәажРҙРҫРіРҫ РёРіСҖРҫРәР° СҒРІРҫРөР№ РәРҫРјР°РҪРҙСӢ Рё РәРҫРјР°РҪРҙСӢ СҒРҫРҝРөСҖРҪРёРәР°. ДлСҸ РјРҪРҫРіРёС… СҒРҝРҫСҖСӮРёРІРҪСӢС… Р°СҖРөРҪ Рё РәР»СғРұРҫРІ СҒРёСҒСӮРөРјСӢ СҒРҝРҫСҖСӮРёРІРҪРҫР№ РІРёРҙРөРҫР°РҪалиСӮРёРәРё СҒСӮали СҒРөРіРҫРҙРҪСҸ РІРөСҒСҢРјР° РҝСҖРёРұСӢР»СҢРҪСӢРј РұРёР·РҪРөСҒРҫРј. РЎРҫР·РҙР°РҪРёРө СӮР°РәРёС… СҒРёСҒСӮРөРј СӮСҖРөРұСғРөСӮ РҫСҖРіР°РҪРёР·Р°СҶРёРё СҒРёРҪС…СҖРҫРҪРҪРҫР№ СҖР°РұРҫСӮСӢ РҙРөСҒСҸСӮРәРҫРІ РәамРөСҖ, РјРҫСүРҪСӢС… РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… РІРҫР·РјРҫР¶РҪРҫСҒСӮРөР№, РҪРҫ СҒ лихвРҫР№ РҫРәСғРҝР°РөСӮСҒСҸ РҝРҫР»СғСҮРөРҪРҪСӢРј СҖРөР·СғР»СҢСӮР°СӮРҫРј.
Р’ СҒРҝРҫСҖСӮРө РҪахРҫРҙСҸСӮ РҝСҖРёРјРөРҪРөРҪРёРө СҒРёСҒСӮРөРјСӢ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ СҖазРҪРҫР№ СҒСӮРҫРёРјРҫСҒСӮРё Рё РјР°СҒСҲСӮР°РұР°. РЎСӮРҫРёРјРҫСҒСӮСҢ РҫСҒРҪР°СүРөРҪРёСҸ СҒРҝРҫСҖСӮРёРІРҪРҫР№ Р°СҖРөРҪСӢ РјРҫР¶РөСӮ РёСҒСҮРёСҒР»СҸСӮСҢСҒСҸ СҒРҫСӮРҪСҸРјРё СӮСӢСҒСҸСҮ РөРІСҖРҫ, Р° РҪРөРұРҫР»СҢСҲР°СҸ Р»РҫРәалСҢРҪР°СҸ СҒРёСҒСӮРөРјР° СҒРәРҫСҖРҫСҒСӮРҪРҫР№ РІРёРҙРөРҫСҖРөРіРёСҒСӮСҖР°СҶРёРё СғР»РҫжиСӮСҒСҸ РІ РҪРөСҒРәРҫР»СҢРәРҫ СӮСӢСҒСҸСҮ. РҹСҖРё СҚСӮРҫРј Р»СҢРІРёРҪСғСҺ РҙРҫР»СҺ СҚСӮРҫР№ СҒСӮРҫРёРјРҫСҒСӮРё СҒРҫСҒСӮавлСҸРөСӮ РҫСӮРҪСҺРҙСҢ РҪРө РҫРұРҫСҖСғРҙРҫРІР°РҪРёРө, Р° РҝСҖРҫРіСҖаммРҪРҫРө РҫРұРөСҒРҝРөСҮРөРҪРёРө Рё РёРҪжиРҪРёСҖРёРҪРі. РһСӮСҒСҺРҙР° РІСӢСҒРҫРәР°СҸ, Р·Р°СҮР°СҒСӮСғСҺ Р·Р°РҝСҖРөРҙРөР»СҢРҪР°СҸ СҒСӮРҫРёРјРҫСҒСӮСҢ РҝСҖРёРҫРұСҖРөСӮРөРҪРёСҸ, СғСҒСӮР°РҪРҫРІРәРё Рё РҫРұСҒР»СғживаРҪРёСҸ РіРҫСӮРҫРІСӢС… СҒРёСҒСӮРөРј РёР·-Р·Р° СҖСғРұРөжа, СҖР°СҒСҒСҮРёСӮР°РҪРҪСӢС… РҪР° РёРҪРҙСғСҒСӮСҖРёСҺ СҒРҝРҫСҖСӮР° СҒ РҙСҖСғРіРёРјРё Р·Р°РҝСҖРҫСҒами Рё РұСҺРҙР¶РөСӮами. РқРөРІСӢСҒРҫРәР°СҸ СҒСӮРҫРёРјРҫСҒСӮСҢ РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ Рё РҝРҫРҪСҸСӮРҪР°СҸ Р°СҖС…РёСӮРөРәСӮСғСҖР° РҫСӮРәСҖСӢРІР°СҺСӮ РҙР»СҸ РҪРҫРІСӢС… РІ РҫРұлаСҒСӮРё РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РёРіСҖРҫРәРҫРІ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ Р»РөРіРәРёР№ РҝСғСӮСҢ РҙР»СҸ РҝСҖРҫРҙРІРёР¶РөРҪРёСҸ СҒРҫРұСҒСӮРІРөРҪРҪРҫРіРҫ РұРёР·РҪРөСҒР° РІ СҒРҝРҫСҖСӮРёРІРҪРҫР№ РёРҪРҙСғСҒСӮСҖРёРё РҪР° РҫСҒРҪРҫРІР°РҪРёРё СғР¶Рө РёРјРөСҺСүРөРіРҫСҒСҸ РҫРҝСӢСӮР° СҖР°РұРҫСӮСӢ СҒ СҒРёСҒСӮРөмами РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ. РқСғР¶РҪРҫ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ РҫСӮРөСҮРөСҒСӮРІРөРҪРҪСӢРө СҖазСҖР°РұРҫСӮСҮРёРәРё, СӮСҖР°РҙРёСҶРёРҫРҪРҪРҫ СҒРёР»СҢРҪСӢРө РІ РёРҪСӮРөРіСҖР°СҶРёРё Рё СҖазСҖР°РұРҫСӮРәРө СҒР»РҫР¶РҪРҫРіРҫ РҝСҖРҫРіСҖаммРҪРҫРіРҫ Рё РјР°СӮРөРјР°СӮРёСҮРөСҒРәРҫРіРҫ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ, СҒРөРіРҫРҙРҪСҸ РјРҫРіСғСӮ РІ РҝРҫР»РҪРҫР№ РјРөСҖРө РҝРҫРјРҫСҮСҢ РІРҫСҒРҝРҫР»СҢР·РҫРІР°СӮСҢСҒСҸ СҚСӮРҫР№ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #3, 2017
РҹРҫСҒРөСүРөРҪРёР№: 6149
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "ДиСҖРөРәСӮРҫСҖ РҝРҫ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


