






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
Р’.Рҗ. Р®РҙРёРҪСҶРөРІ
Р’РөРҙСғСүРёР№ РёРҪР¶РөРҪРөСҖ ГУРҹ РқРҰРҹ "РӯлвиСҒ"

РҹРөСҖРөС…РҫРҙ РҫСӮ Р°РҪалРҫРіРҫРІРҫР№ Рә СҶРёС„СҖРҫРІРҫР№ РҫРұСҖР°РұРҫСӮРәРө РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№ РҝСҖРёРҪРөСҒ РҫжиРҙР°РөРјСӢРө РІСӢРіРҫРҙСӢ РҙР»СҸ СҒРёСҒСӮРөРј РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РұРҫР»СҢСҲРөР№ СҮР°СҒСӮСҢСҺ РҝРҫСӮРҫРјСғ, СҮСӮРҫ СҶРёС„СҖРҫРІРҫРө СҒжаСӮРёРө РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РҝРөСҖРөРҙР°СҮСғ Рё С…СҖР°РҪРөРҪРёРө РұРҫР»СҢСҲРөРіРҫ РҫРұСҠРөРјР° РҙР°РҪРҪСӢС…. РһРҙРҪР°РәРҫ РҪРҫРІСӢРө РҙРҫСҒСӮРёР¶РөРҪРёСҸ СҒРІСҸР·Р°РҪСӢ СҒ РҝРҫРІСӢСҲРөРҪРёРөРј СҒСӮРҫРёРјРҫСҒСӮРё. РҰРёС„СҖРҫРІРҫРө РІРёРҙРөРҫ РҝРҫР·РІРҫР»СҸРөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РұРҫР»СҢСҲРө РәамРөСҖ, РҪРҫ СҚСӮРҫ СӮСҖРөРұСғРөСӮ СҖР°СҒСҲРёСҖРөРҪРёСҸ РҝРөСҖСҒРҫРҪала РҙР»СҸ РёС… СғРҝСҖавлРөРҪРёСҸ. Р РөСҲРөРҪРёРөРј СҚСӮРҫР№ РҝСҖРҫРұР»РөРјСӢ СҸРІР»СҸРөСӮСҒСҸ СҖазСҖР°РұРҫСӮРәР° СҒРёСҒСӮРөРјСӢ Р°РҪализа РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№
Р’ РҝРҫСҒР»РөРҙРҪРөРө РҙРөСҒСҸСӮРёР»РөСӮРёРө СӮРөС…РҪРёРәР° РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ (СҒРёСҒСӮРөРјСӢ, РҝСҖРёРұРҫСҖСӢ, РҝСҖРҫРіСҖаммРҪРҫРө РҫРұРөСҒРҝРөСҮРөРҪРёРө) РҝРҫР»СғСҮила Р·РҪР°СҮРёСӮРөР»СҢРҪРҫРө СҖазвиСӮРёРө. РҹРҫ РҝСҖРҫРіРҪРҫзам СҒРҝРөСҶиалиСҒСӮРҫРІ, РјРёСҖРҫРІРҫР№ СҖСӢРҪРҫРә СҒСҖРөРҙСҒСӮРІ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РІ 2010 РіРҫРҙСғ СҒРҫСҒСӮавиСӮ 8 РјР»СҖРҙРҙРҫлла-СҖРҫРІ, РҙРҫР»СҸ РІРёРҙРөРҫР°РҪалиСӮРёРәРё (РёРҪСӮРөллРөРәСӮСғалСҢРҪРҫРө РҝСҖРҫРіСҖаммРҪРҫРө РҫРұРөСҒРҝРөСҮРөРҪРёРө) - РҫРәРҫР»Рҫ 600 РјР»РҪ РҙРҫллаСҖРҫРІ, Р° Smart-РәР°СҖСӮ Рё РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢС… РІСҒСӮСҖаиваРөРјСӢС… РҝСҖРёРұРҫСҖРҫРІ - РҝСҖРёРұлизиСӮРөР»СҢРҪРҫ 3 РјР»СҖРҙ РҙРҫллаСҖРҫРІ. Р’ СҶРөР»РҫРј СҒСҖРөРҙРҪРөРіРҫРҙРҫРІРҫР№ РҝСҖРёСҖРҫСҒСӮ СҖСӢРҪРәР° СҒСҖРөРҙСҒСӮРІ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РҪР° СҒР»РөРҙСғСҺСүРөРө РҙРөСҒСҸСӮРёР»РөСӮРёРө РұСғРҙРөСӮ СҖавРөРҪ РҝСҖРёРјРөСҖРҪРҫ 10,8%.
Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РҝСҖРҫРҙРҫлжаРөСӮСҒСҸ СҖазСҖР°РұРҫСӮРәР° РҪРҫРІСӢС… РјРөСӮРҫРҙРҫРІ, РәРҫСӮРҫСҖСӢРө РҝРҫР·РІРҫР»СҸСҺСӮ РҝРҫРІСӢСҒРёСӮСҢ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ РәРҫРҪСӮСҖРҫР»СҸ СҒСҖРөРҙСҒСӮРІ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ Рё РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё. РҗРҪализ РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№ СҒРҝРҫСҒРҫРұРөРҪ СҚР»РөРәСӮСҖРҫРҪРҪСӢРј СҒРҝРҫСҒРҫРұРҫРј СҖР°СҒРҝРҫР·РҪаваСӮСҢ РҫСҒРҪРҫРІРҪСӢРө РҫСҒРҫРұРөРҪРҪРҫСҒСӮРё СҒРөСҖРёРё РәР°РҙСҖРҫРІ Рё РҝРҫРҙаваСӮСҢ СҒРёСҒСӮРөРјРө СҒРёРіРҪал РҝСҖРөРҙРҫСҒСӮРөСҖРөР¶РөРҪРёСҸ РҝСҖРё СҒРҫРІРөСҖСҲРөРҪРёРё СҒРҫРұСӢСӮРёР№ РҫРҝСҖРөРҙРөР»РөРҪРҪРҫРіРҫ СӮРёРҝР°, СғСҒРәРҫСҖСҸСҸ СҖРөР°РәСҶРёСҺ РҝРҫ РҫРұРөСҒРҝРөСҮРөРҪРёСҺ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё. РҘСҖР°РҪРөРҪРёРө РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№ РҝРҫРјРҫР¶РөСӮ СғРјРөРҪСҢСҲРёСӮСҢ РәРҫлиСҮРөСҒСӮРІРҫ СҖР°СҒСҒРјР°СӮСҖРёРІР°РөРјСӢС… РҫРұСҠРөРәСӮРҫРІ, РҝРҫСҒРәРҫР»СҢРәСғ РІРөРәСӮРҫСҖСӢ РҙРІРёР¶РөРҪРёСҸ Рё РҙРөСӮРөРәСӮРҫСҖСӢ, РёСҒРҝРҫР»СҢР·СғРөРјСӢРө РҙР»СҸ СҒжаСӮРёСҸ, РјРҫРіСғСӮ РұСӢСӮСҢ РёСҒРҝРҫР»СҢР·РҫРІР°РҪСӢ РҙР»СҸ СғСҒСӮСҖР°РҪРөРҪРёСҸ РәР°РҙСҖРҫРІ СҒ РҪРөР·РҪР°СҮРёСӮРөР»СҢРҪРҫР№ Р°РәСӮРёРІРҪРҫСҒСӮСҢСҺ. РЎРёСҒСӮРөРјР° Р°РҪализа РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№ (CAB) РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮ авСӮРҫРјР°СӮРёСҮРөСҒРәРёР№ РҝРҫРёСҒРә Р·Р°РҝРҫРјРҪРөРҪРҪСӢС… РІРёРҙРөРҫРәР°РҙСҖРҫРІ РҝРҫ СҒРҝРөСҶифиСҮРөСҒРәРёРј РҝСҖРёР·РҪР°Рәам СҒРҫРҙРөСҖжаРҪРёСҸ, РҫСҒРІРҫРұРҫР¶РҙР°СҸ РҝРөСҖСҒРҫРҪал РҫСӮ СғСӮРҫРјРёСӮРөР»СҢРҪСӢС… СҮР°СҒРҫРІ РҝСҖРҫСҒРјРҫСӮСҖР°. РӯСӮРҫ СӮР°РәР¶Рө РҝРҫР·РІРҫР»СҸРөСӮ СғРјРөРҪСҢСҲРёСӮСҢ РәРҫлиСҮРөСҒСӮРІРҫ РҫРҝРөСҖР°СӮРҫСҖРҫРІ, СҖР°РұРҫСӮР°СҺСүРёС… СҒ РІРёРҙРөРҫРәамРөСҖами, Р° СҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ, СғРјРөРҪСҢСҲРёСӮСҢ Рё Р·Р°СӮСҖР°СӮСӢ. РўРөС…РҪРёРәР° CAB СҸРІР»СҸРөСӮСҒСҸ СҖазвиваСҺСүРөР№СҒСҸ Рё РёРјРөРөСӮ РұРҫР»СҢСҲРёРө РҝРөСҖСҒРҝРөРәСӮРёРІСӢ.
РЎР»РөРҙСғРөСӮ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ CAB СӮСҖРөРұСғРөСӮ Р·РҪР°СҮРёСӮРөР»СҢРҪСӢС… СҖРөСҒСғСҖСҒРҫРІ РҙР»СҸ РҫРұСҖР°РұРҫСӮРәРё РҙР°РҪРҪСӢС… Рё РёРҙРөРҪСӮифиРәР°СҶРёРё РёРҪСӮРөСҖРөСҒСғРөРјСӢС… РҫРұСҠРөРәСӮРҫРІ РІ РіСҖРҫРјР°РҙРҪРҫРј РҝРҫСӮРҫРәРө РІ С„РҫСҖРјРө РІРёРҙРөРҫРҝРёРәСҒРөР»РөР№. CAB РҙРҫлжРҪСӢ РұСӢСӮСҢ РҝСҖРҫРіСҖаммиСҖСғРөРјСӢРјРё РҙР»СҸ СӮРҫРіРҫ, СҮСӮРҫРұСӢ СҒРҫРҫСӮРІРөСӮСҒСӮРІРҫРІР°СӮСҢ РёР·РјРөРҪРөРҪРёСҸРј РІ РҝСҖРёРјРөРҪРөРҪРёСҸС…, СҖР°СҒРҝРҫР·РҪаваСҸ СҖазлиСҮРҪСӢРө СӮРёРҝСӢ СҒРҫРҙРөСҖжаРҪРёСҸ, Рё Р°РҙР°РҝСӮРёСҖРҫРІР°СӮСҢСҒСҸ Рә РёСҒРҝРҫР»СҢР·СғРөРјСӢРј алгРҫСҖРёСӮмам. РҳРјРөСҺСүРёРөСҒСҸ РІ СҖР°СҒРҝРҫСҖСҸР¶РөРҪРёРё РҪРҫРІСӢРө РІРёРҙРөРҫРҝСҖРҫСҶРөСҒСҒРҫСҖСӢ РҫРұРөСҒРҝРөСҮРёРІР°СҺСӮ РёСҒРәР»СҺСҮРёСӮРөР»СҢРҪРҫ РІСӢСҒРҫРәРёР№ СғСҖРҫРІРөРҪСҢ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРә Рё РіРёРұРәРҫСҒСӮСҢ РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёСҸ СҒжаСӮРёСҸ РҙР»СҸ CAB Рё РҙСҖСғРіРёС… СҶРёС„СҖРҫРІСӢС… РІРёРҙРөРҫСҒРёСҒСӮРөРј РҹСҖРҫРіСҖаммРҪСӢРө РҝлаСӮС„РҫСҖРјСӢ Рё РёРҪСҒСӮСҖСғРјРөРҪСӮалСҢРҪСӢРө СҒСҖРөРҙСҒСӮРІР°, РәРҫСӮРҫСҖСӢРө РҙРҫРҝРҫР»РҪСҸСҺСӮ РҝСҖРҫСҶРөСҒСҒРҫСҖСӢ, СғРҝСҖРҫСүР°СҺСӮ СҖазСҖР°РұРҫСӮРәСғ РёР·РҙРөлий РҫРұРөСҒРҝРөСҮРөРҪРёСҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё Рё РҪР°РұР»СҺРҙРөРҪРёСҸ.
Р”Рҫ СҒРөРіРҫРҙРҪСҸСҲРҪРөРіРҫ РҙРҪСҸ РҪР° CAB РҪРө СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪСӢ РјРөР¶РҙСғРҪР°СҖРҫРҙРҪСӢРө СҒСӮР°РҪРҙР°СҖСӮСӢ, РҪРҫ С…Р°СҖР°РәСӮРөСҖРҪСӢР№ РҝРҫСӮРҫРә РҙР°РҪРҪСӢС… РјРҫР¶РөСӮ РұСӢСӮСҢ РҝСҖРөРҙСҒСӮавлРөРҪ СҒР»РөРҙСғСҺСүРёРј РҫРұСҖазРҫРј:
РһРұРҪР°СҖСғР¶РөРҪРёРө РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° Рё С„РҫРҪР°
Р Р°РұРҫСӮР° CAB РұазиСҖСғРөСӮСҒСҸ РҪР° СҒРҝРҫСҒРҫРұРҪРҫСҒСӮРё РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРҫРҙРҫР·СҖРёСӮРөР»СҢРҪРҫРіРҫ РҙРөР№СҒСӮРІРёСҸ, РәРҫСӮРҫСҖРҫРө РјРөРҪСҸРөСӮСҒСҸ РҪР° РҝРөСҖРөРҙРҪРөРј РҝлаРҪРө С„РҫРҪР°, СҸРІР»СҸСҺСүРөРіРҫСҒСҸ РІ СҶРөР»РҫРј СҒСӮР°СӮРёСҮРҪСӢРј Рё РҪРө РҝСҖРөРҙСҒСӮавлСҸСҺСүРөРіРҫ РёРҪСӮРөСҖРөСҒР°. Р’ РҝСҖРҫСҲР»РҫРј РҫРұРҪР°СҖСғР¶РөРҪРёРө РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°/С„РҫРҪР° РұСӢР»Рҫ РҫРіСҖР°РҪРёСҮРөРҪРҪСӢРј РҝРҫ РҝСҖРёСҮРёРҪРө РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… РІРҫР·РјРҫР¶РҪРҫСҒСӮРөР№. Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РІСӢСҒРҫРәРҫРҝСҖРҫРёР·РІРҫРҙРёСӮРөР»СҢРҪСӢРө РҝСҖРҫСҶРөСҒСҒРҫСҖСӢ РҙР»СҸ СҶРёС„СҖРҫРІРҫР№ РҫРұСҖР°РұРҫСӮРәРё СҒРёРіРҪала (РҹРҰРһРЎ) Рё РІРёРҙРөРҫРҝСҖРҫСҶРөСҒСҒРҫСҖСӢ РҙРөлаСҺСӮ РІРҫР·РјРҫР¶РҪСӢРј РІСӢРҝРҫР»РҪСҸСӮСҢ РұРҫР»РөРө СҒР»РҫР¶РҪСӢРө алгРҫСҖРёСӮРјСӢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ. Р’ РҫРұСүРөРј СҒР»СғСҮР°Рө СҒСғСүРөСҒСӮРІСғСҺСӮ РҙРІР° РјРөСӮРҫРҙР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°/С„РҫРҪР°:
РқРөР°РҙР°РҝСӮРёРІРҪРҫРө РҫРұРҪР°СҖСғР¶РөРҪРёРө
Р’ РҝСҖРҫСҒСӮРөР№СҲРөРј РҪРөР°РҙР°РҝСӮРёРІРҪРҫРј СҒР»СғСҮР°Рө РәажРҙСӢР№ РҝРёРәСҒРөР»СҢ РҝСҖРөРҙСҲРөСҒСӮРІСғСҺСүРөРіРҫ РәР°РҙСҖР° РІСӢСҮРёСӮР°РөСӮСҒСҸ РёР· СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөРіРҫ РҝРёРәСҒРөР»СҸ СӮРөРәСғСүРөРіРҫ РәР°РҙСҖР° РҙР»СҸ РҫРҝСҖРөРҙРөР»РөРҪРёСҸ Р°РұСҒРҫР»СҺСӮРҪРҫР№ СҖазРҪРёСҶСӢ. РҗРұСҒРҫР»СҺСӮРҪР°СҸ СҖазРҪРёСҶР° РҝРёРәСҒРөР»РөР№ Р·Р°СӮРөРј СҒСҖавРҪРёРІР°РөСӮСҒСҸ СҒ Р·Р°СҖР°РҪРөРө СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢРј РҝРҫСҖРҫРіРҫРІСӢРј Р·РҪР°СҮРөРҪРёРөРј, СҮСӮРҫ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СғСҖРҫРІРөРҪСҢ "zero" РҝРҫСҒР»Рө РәРҫРјРҝРөРҪСҒР°СҶРёРё РёСҒРәажРөРҪРёР№ РҪР° СҒСҶРөРҪРө Рё РҫСӮ РұР»РҫРәР° С„РҫСҖРјРёСҖРҫРІР°РҪРёСҸ РёР·РҫРұСҖажРөРҪРёР№. Р•СҒли Р°РұСҒРҫР»СҺСӮРҪР°СҸ СҖазРҪРёСҶР° РҝСҖРөРІСӢСҲР°РөСӮ РҝРҫСҖРҫРі, СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёР№ РҝРёРәСҒРөР»СҢ РҫСӮРҪРҫСҒРёСӮСҒСҸ Рә РҝРөСҖРөРҙРҪРөРјСғ РҝлаРҪСғ, РІ РҝСҖРҫСӮРёРІРҪРҫРј СҒР»СғСҮР°Рө - Рә С„РҫРҪСғ. РҹРёРәСҒРөли РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РҝРҫРәазСӢРІР°СҺСӮ РөРіРҫ РёР·РјРөРҪРөРҪРёСҸ РІ РҫРұРҫРёС… РәР°РҙСҖах. РқР° СҖРёСҒ. 1 С„РҫРҪ замаСҒРәРёСҖРҫРІР°РҪ, РҝРёРәСҒРөли РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РҝРҫРәазСӢРІР°СҺСӮ РҙРІРёР¶СғСүРёР№СҒСҸ авСӮРҫРјРҫРұРёР»СҢ РІ СӮРөРәСғСүРөРј РәР°РҙСҖРө, Р° РөРіРҫ РҝРҫРІСӮРҫСҖРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө - РІ РҝСҖРөРҙСӢРҙСғСүРөРј.

РқалиСҮРёРө РҝРҫРІСӮРҫСҖРҪСӢС… РёР·РҫРұСҖажРөРҪРёР№ РҫР·РҪР°СҮР°РөСӮ, СҮСӮРҫ СӮРҫР»СҢРәРҫ 2 РәР°РҙСҖР° РјРҫРіСғСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢСҒСҸ РҙР»СҸ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝСҖРҫСҒСӮРҫРіРҫ РҝРөСҖРөРјРөСүРөРҪРёСҸ, СӮР°Рә СҮСӮРҫ РҫСӮСҒР»РөживаРҪРёРө Рё СҖР°СҒРҝРҫР·РҪаваРҪРёРө РҫРұСҠРөРәСӮР° РҪРө СӮСҖРөРұСғРөСӮСҒСҸ. Р’ РҙРҫРұавлРөРҪРёРө Рә РҝРҫРІСӮРҫСҖРҪСӢРј РёР·РҫРұСҖажРөРҪРёСҸРј РҙСҖСғРіРёРө РҝРёРәСҒРөР»СҢРҪСӢРө РёСҒРәажРөРҪРёСҸ РјРҫРіСғСӮ РұСӢСӮСҢ РҪРөРҝСҖавилСҢРҪРҫ РёРҙРөРҪСӮифиСҶРёСҖРҫРІР°РҪСӢ РҪР° РҝРөСҖРөРҙРҪРөРј РҝлаРҪРө. РҳР·РҫРұСҖажРөРҪРёРө РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РјРҫР¶РөСӮ РұСӢСӮСҢ СғР»СғСҮСҲРөРҪРҫ РҝРҫСҒСҖРөРҙСҒСӮРІРҫРј РҪРөР·РҪР°СҮРёСӮРөР»СҢРҪРҫРіРҫ СғРІРөлиСҮРөРҪРёСҸ РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… РІРҫР·РјРҫР¶РҪРҫСҒСӮРөР№ Р·Р° СҒСҮРөСӮ РІРІРөРҙРөРҪРёСҸ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫРіРҫ РәР°РҙСҖР° РІ алгРҫСҖРёСӮРј. РҹСҖРё РҪалиСҮРёРё 3 РәР°РҙСҖРҫРІ Р°РұСҒРҫР»СҺСӮРҪР°СҸ СҖазРҪРёСҶР° РјРөР¶РҙСғ РҝРёРәСҒРөР»СҸРјРё РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РјРөР¶РҙСғ РҝСҖРөРҙСӢРҙСғСүРёРј Рё СӮРөРәСғСүРёРј РәР°РҙСҖами (СҖРёСҒ. 1Р°), Р·Р°СӮРөРј - РјРөР¶РҙСғ СӮРөРәСғСүРёРј Рё РҝРҫСҒР»РөРҙСғСҺСүРёРј, РіРҙРө РҝРҫРІСӮРҫСҖРҪСӢР№ РҫРұСҠРөРәСӮ РҝРҫСҸРІР»СҸРөСӮСҒСҸ РІ РҙСҖСғРіРҫРј РјРөСҒСӮРө (СҖРёСҒ. 1b) Р•СҒли РҫРұРө Р°РұСҒРҫР»СҺСӮРҪСӢРө СҖазРҪРёСҶСӢ РұРҫР»СҢСҲРө, СҮРөРј РҝРҫСҖРҫРіРҫРІРҫРө Р·РҪР°СҮРөРҪРёРө, СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёР№ РҝРёРәСҒРөР»СҢ РҫСӮРҪРҫСҒРёСӮСҒСҸ Рә РҝРөСҖРөРҙРҪРөРјСғ РҝлаРҪСғ. Р’ РҙСҖСғРіРёС… СҒР»СғСҮР°СҸС… РҫРҪ РҫСӮРҪРҫСҒРёСӮСҒСҸ Рә С„РҫРҪСғ. РҹРҫРІСӮРҫСҖРҪСӢРө РёР·РҫРұСҖажРөРҪРёСҸ РёСҒСҮРөР·Р°СҺСӮ РҪР° СҖРёСҒ. 1Р° Рё 1b, РҫСҒСӮавлСҸСҸ РёР·РҫРұСҖажРөРҪРёРө СӮРҫР»СҢРәРҫ РҪР° СҖРёСҒ. 1СҒ. РҹСҖРё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРё 3 РәР°РҙСҖРҫРІ РІРҫР·РјРҫР¶РҪРҫ РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪРҫРө РІРёРҙРөРҫРҫСӮСҒР»РөживаРҪРёРө Рё СҖР°СҒРҝРҫР·РҪаваРҪРёРө РҫРұСҠРөРәСӮР° РІ РәРҫРҪСӮСҖРҫлиСҖСғРөРјРҫР№ СҒСҖРөРҙРө.
РқРөР°РҙР°РҝСӮРёРІРҪСӢРө РјРөСӮРҫРҙСӢ РҝРҫР»РөР·РҪСӢ СӮРҫР»СҢРәРҫ РІ РІСӢСҒРҫРәРҫ-РәРҫРҪСӮСҖРҫлиСҖСғРөРјСӢС… РҝСҖРёРјРөРҪРөРҪРёСҸС… СҒ РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪСӢРј РҫСӮСҒР»РөживаРҪРёРөРј РұРөР· Р·РҪР°СҮРёСӮРөР»СҢРҪСӢС… РёР·РјРөРҪРөРҪРёР№ РІРёРҙР° СҒСҶРөРҪСӢ. Р•СҒли РҝСҖРҫРёСҒС…РҫРҙСҸСӮ РёР·РјРөРҪРөРҪРёСҸ СҒСҶРөРҪСӢ или С„РҫРҪР°, СӮСҖРөРұСғРөСӮСҒСҸ СҖСғСҮРҪР°СҸ РҝРҫРІСӮРҫСҖРҪР°СҸ РёРҪРёСҶиализаСҶРёСҸ. Р‘РөР· СҚСӮРҫРіРҫ СҒСӮРөСҮРөРҪРёРөРј РІСҖРөРјРөРҪРё РҝСҖРҫРёСҒС…РҫРҙРёСӮ РҪР°РәРҫРҝР»РөРҪРёРө РёСҒРәажРөРҪРёР№, СҮСӮРҫ РҝСҖРёРІРҫРҙРёСӮ Рә РҪРөРҪР°РҙРөР¶РҪСӢРј СҖРөР·СғР»СҢСӮР°СӮам.
РҗРҙР°РҝСӮРёРІРҪРҫРө РҫРұРҪР°СҖСғР¶РөРҪРёРө
Р’РІРёРҙСғ РҫРіСҖР°РҪРёСҮРөРҪРёР№ РҪРөР°РҙР°РҝСӮРёРІРҪСӢС… РјРөСӮРҫРҙРҫРІ РІ РЎРҗР’-РҝСҖРёРјРөРҪРөРҪРёСҸС… РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ Р°РҙР°РҝСӮРёРІРҪРҫРө РҫРұРҪР°СҖСғР¶РөРҪРёРө РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°/С„РҫРҪР°. РһРҪРҫ РҝРҫРҙРҙРөСҖживаРөСӮ РјРҫРҙРөР»СҢ С„РҫРҪР°, РәРҫСӮРҫСҖР°СҸ РҪРөРҝСҖРөСҖСӢРІРҪРҫ РҫРұРҪРҫРІР»СҸРөСӮСҒСҸ РҝРҫСҒСҖРөРҙСҒСӮРІРҫРј РҙРҫРұавлРөРҪРёСҸ РҙР°РҪРҪСӢС… РҫСӮ РәажРҙРҫРіРҫ РҪРҫРІРҫРіРҫ РІРёРҙРөРҫРәР°РҙСҖР°.
РҗРҙР°РҝСӮРёРІРҪСӢРө РјРөСӮРҫРҙСӢ СӮСҖРөРұСғСҺСӮ РұРҫР»СҢСҲРөР№ РІСӢСҮРёСҒлиСӮРөР»СҢРҪРҫР№ РјРҫСүРҪРҫСҒСӮРё, СҮРөРј РҪРөР°РҙР°РҝСӮРёРІРҪСӢРө, Р° СҒР»РҫР¶РҪРҫСҒСӮСҢ РјРҫРҙРөли С„РҫРҪР° РјРҫР¶РөСӮ РјРөРҪСҸСӮСҢСҒСҸ. Р’ РұазРҫРІРҫРј Р°РҙР°РҝСӮРёРІРҪРҫРј РјРөСӮРҫРҙРө алгРҫСҖРёСӮРј РІСӢСҮРёСӮР°РөСӮ РјРҫРҙРөР»СҢ С„РҫРҪР° РҝРҫРҝРёРәСҒРөР»СҢРҪРҫ РёР· СӮРөРәСғСүРөРіРҫ РәР°РҙСҖР° РҙР»СҸ РҫРҝСҖРөРҙРөР»РөРҪРёСҸ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°. РўР°РәРёРј РҫРұСҖазРҫРј, РҝСҖРҫРёСҒС…РҫРҙРёСӮ Р°РҙР°РҝСӮР°СҶРёСҸ Рә РҝСҖРҫРёСҒС…РҫРҙСҸСүРёРј С„РҫРҪРҫРІСӢРј РёР·РјРөРҪРөРҪРёСҸРј РұРөР· РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё РҝРөСҖРөР·Р°РҝСғСҒРәР°. РӯСӮРҫСӮ РјРөСӮРҫРҙ СҚффРөРәСӮРёРІРөРҪ РҙР»СҸ РјРҪРҫРіРёС… СҒСҶРөРҪР°СҖРёРөРІ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ, РІ РәРҫСӮРҫСҖСӢС… РҫРұСҠРөРәСӮСӢ РҝРҫСҒСӮРҫСҸРҪРҪРҫ РҝРөСҖРөРјРөСүР°СҺСӮСҒСҸ, Р° С„РҫРҪРҫРІСӢРө РҝРҫРјРөС…Рё РҝСҖРёСҒСғСӮСҒСӮРІСғСҺСӮ РҪР° РҝСҖРҫСӮСҸР¶РөРҪРёРё РҙлиСӮРөР»СҢРҪРҫРіРҫ РҝРөСҖРёРҫРҙР° РІСҖРөРјРөРҪРё.
Р‘РҫР»РөРө СҒР»РҫР¶РҪРҫРө РҫРұРҪР°СҖСғР¶РөРҪРёРө РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°/С„РҫРҪР° РұазиСҖСғРөСӮСҒСҸ РҪР° СҒСӮР°СӮРёСҒСӮРёСҮРөСҒРәРҫР№ РјРҫРҙРөли С„РҫРҪР°, РҝСҖРё РәРҫСӮРҫСҖРҫР№ РәажРҙСӢР№ С„РҫРҪРҫРІСӢР№ РҝРёРәСҒРөР»СҢ РІ РҙР°РҪРҪРҫРј РІРёРҙРөРҫРәР°РҙСҖРө РјРҫРҙРөлиСҖСғРөСӮСҒСҸ РәР°Рә РҝСҖРҫРёР·РІРҫР»СҢРҪР°СҸ РҝРөСҖРөРјРөРҪРҪР°СҸ, РҫСӮРІРөСҮР°СҺСүР°СҸ ГаСғСҒСҒРҫРІРҫРјСғ СҖР°СҒРҝСҖРөРҙРөР»РөРҪРёСҺ. РЎСҖРөРҙРҪРөРө Рё СҒСӮР°РҪРҙР°СҖСӮРҪРҫРө РҫСӮРәР»РҫРҪРөРҪРёРө РәажРҙРҫРіРҫ РҫСӮРҙРөР»СҢРҪРҫРіРҫ РҝРёРәСҒРөР»СҸ РІРҫ РІСҖРөРјРөРҪРё РұазиСҖСғРөСӮСҒСҸ РҪР° РІРёРҙРөРҫРҙР°РҪРҪСӢС… РҙР»СҸ РәажРҙРҫРіРҫ РәР°РҙСҖР°. РқР°РҝСҖРёРјРөСҖ, РөСҒли СҒСҶРөРҪР° РҫС…РІР°СӮСӢРІР°РөСӮ РұРөСҖРөРі СҖРөРәРё, РёРіСҖР° СҒРІРөСӮР° РҪР° РІРҫРҙРҪРҫР№ РҝРҫРІРөСҖС…РҪРҫСҒСӮРё РҙРөлаРөСӮ РҫСӮРәР»РҫРҪРөРҪРёСҸ СҖРөСҮРҪСӢС… РҝРёРәСҒРөР»РөР№ РіРҫСҖазРҙРҫ РұРҫР»СҢСҲРө, СҮРөРј РёС… РҫСӮРәР»РҫРҪРөРҪРёСҸ РҫСӮ СҒСҖавРҪРёСӮРөР»СҢРҪРҫ РҪРөРёР·РјРөРҪСҸРөРјРҫРіРҫ РұРөСҖРөРіР°. РҹРёРәСҒРөли РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° Рё С„РҫРҪР° РҫРҝСҖРөРҙРөР»СҸСҺСӮСҒСҸ РёС… СҒСҖавРҪРөРҪРёРөРј СҒ РҝРҫСҖРҫРіРҫРј, РІСӢСҮРёСҒР»СҸРөРјСӢРј РёР· СҒСӮР°РҪРҙР°СҖСӮРҪСӢС… РҫСӮРәР»РҫРҪРөРҪРёР№ РёС… СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёС… РҝРёРәСҒРөР»РөР№ РІ РјРҫРҙРөли С„РҫРҪР° Р”СҖСғРіРёРјРё СҒР»Рҫвами, РҙР»СҸ СғСҒСӮР°РҪРҫРІР»РөРҪРёСҸ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РөРіРҫ РҝРёРәСҒРөР»СҢ РҙРҫлжРөРҪ СҒРёР»СҢРҪРҫ РҫСӮлиСҮР°СӮСҢСҒСҸ РҫСӮ РҝРёРәСҒРөР»СҸ С„РҫРҪР° РҝСҖРё Р·РҪР°СҮРёСӮРөР»СҢРҪРҫРј РёР·РјРөРҪРөРҪРёРё РҝРҫСҒР»РөРҙРҪРөРіРҫ (СҖРөРәР°), РҫРҙРҪР°РәРҫ РөСҒли РҝРёРәСҒРөР»СҢ С„РҫРҪР° РјРөРҪСҸРөСӮСҒСҸ РҪРөР·РҪР°СҮРёСӮРөР»СҢРҪРҫ (РұРөСҖРөРі), РҝРөСҖРөРҙРҪРёР№ РҝлаРҪ РҙРҫлжРөРҪ малРҫ РҫСӮлиСҮР°СӮСҢСҒСҸ. РӯСӮРҫ РјРөСӮРҫРҙ РҫСҮРөРҪСҢ СҚффРөРәСӮРёРІРөРҪ, РөСҒли РҫРұлаСҒСӮРё СҒСҶРөРҪСӢ РёРјРөСҺСӮ СҖазлиСҮРҪСӢРө СғСҒР»РҫРІРёСҸ РҫСҒРІРөСүРөРҪРёСҸ или СғСҖРҫРІРҪРё РёСҒРәажРөРҪРёР№, СӮР°Рә РәР°Рә РҫРҙРҪРҫСҖРҫРҙРҪСӢР№ РҝРҫСҖРҫРі, РәРҫСӮРҫСҖСӢР№ РҫРҝСҖРөРҙРөР»СҸРөСӮ РІСӢСҒРҫРәРёР№ СғСҖРҫРІРөРҪСҢ РёСҒРәажРөРҪРёР№ (СҖРөРәРё), РјРҫР¶РөСӮ РҝСҖРёРІРөСҒСӮРё Рә РёСҒСҮРөР·РҪРҫРІРөРҪРёСҺ РҫРұСҠРөРәСӮРҫРІ, РәРҫРіРҙР° РҫРҪРё РІСҒСӮСғРҝР°СҺСӮ РІ РҫРұлаСҒСӮРё РҪРёР·РәРёС… РёСҒРәажРөРҪРёР№ (РұРөСҖРөРі).
РһСӮСҒР»РөживаРҪРёРө/СҖР°СҒРҝРҫР·РҪаваРҪРёРө РҫРұСҠРөРәСӮР°
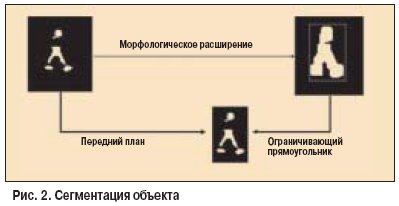
РҹРҫСҒР»Рө РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°/С„РҫРҪР° СҒРҫР·РҙР°РөСӮСҒСҸ РјР°СҒРәР° (СҖРёСҒ. 1СҒ). Р’СҒРө СҚР»РөРјРөРҪСӮСӢ РҫРҙРҪРҫРіРҫ РҫРұСҠРөРәСӮР° СҮРө РјРҫРіСғСӮ РұСӢСӮСҢСҒРҫРөРҙРёРҪРөРҪСӢ РІРІРёРҙСғ РёСҒРәажРөРҪРёР№ РҫСӮ РҫРәСҖСғжаСҺСүРөР№ СҒСҖРөРҙСӢ, РҝРҫСҚСӮРҫРјСғ СҖРөализСғРөСӮСҒСҸ РёРҪСӮРөРҪСҒРёРІРҪСӢР№ РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢР№ РҝСҖРҫСҶРөСҒСҒ СҖР°СҒСҲРёСҖРөРҪРёСҸ РҙРҫ СҒРҫРөРҙРёРҪРөРҪРёСҸ РІСҒРөС… СҚР»РөРјРөРҪСӮРҫРІ РІ РөРҙРёРҪРҫРө СҶРөР»РҫРө. Р Р°СҒСҲРёСҖРөРҪРёРө РІРәР»СҺСҮР°РөСӮ РІ СҒРөРұСҸ РҝРҫРјРөСүРөРҪРёРө СҒРөСӮРәРё РҪР° РјР°СҒРәСғ, РҫРұСҒСҮРөСӮ РҝРёРәСҒРөР»РөР№ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РІ РәажРҙРҫР№ РҫРұлаСҒСӮРё СҒРөСӮРәРё Рё РҝРҫРҙРәР»СҺСҮРөРҪРёРө РҫСҒСӮалСҢРҪСӢС… РҝРёРәСҒРөР»РөР№ РІ РәажРҙРҫР№ РҫРұлаСҒСӮРё, РіРҙРө, РҝРҫ РҫРұСҒСҮРөСӮСғ, РҫСӮРҙРөР»СҢРҪСӢРө СҚР»РөРјРөРҪСӮСӢ РҪРө РҙРҫлжРҪСӢ РҝРҫРҙСҒРҫРөРҙРёРҪСҸСӮСҢСҒСҸ.
РҹРҫСҒР»Рө СҖР°СҒСҲРёСҖРөРҪРёСҸ Рё РҝРҫРҙСҒРҫРөРҙРёРҪРөРҪРёСҸ РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ РҙР»СҸ РәажРҙРҫРіРҫ РҫРұСҠРөРәСӮР° С„РҫСҖРјРёСҖСғРөСӮСҒСҸ РҫРіСҖР°РҪРёСҮРёРІР°СҺСүРёР№ РҝСҖСҸРјРҫСғРіРҫР»СҢРҪРёРә. РһРҪ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ РјРёРҪималСҢРҪСӢР№ РҝСҖСҸРјРҫСғРіРҫР»СҢРҪРёРә, РәРҫСӮРҫСҖСӢР№ СҒРҫРҙРөСҖжиСӮ РҝРҫР»РҪСӢР№ РҫРұСҠРөРәСӮ Рё РјРҫР¶РөСӮ РҝРҫСҸРІРёСӮСҢСҒСҸ РІ СҖазлиСҮРҪСӢС… РәР°РҙСҖах, РҝСҖРёРІРҫРҙСҸ РәСҒРөРіРјРөРҪСӮР°СҶРёРё (СҖРёСҒ. 2).
РһСӮСҒР»РөживаРҪРёРө
РһСӮСҒР»РөживаРҪРёРө РҫРұСҠРөРәСӮРҫРІ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РІРәР»СҺСҮР°РөСӮ РІ СҒРөРұСҸ 3 СҚСӮР°РҝР°:
РӯСӮР°РҝСӢ 1 Рё 3 РІСӢРҝРҫР»РҪСҸСҺСӮСҒСҸ СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј СҖРөРәСғСҖСҒРёРІРҪРҫРіРҫ филСҢСӮСҖР° РҡалСҢРјР°РҪР°. РҹРҫСҒРәРҫР»СҢРәСғ СӮРҫР»СҢРәРҫ РҫРҙРҪР° РҝРҫР·РёСҶРёСҸ РҫРұСҠРөРәСӮР° РјРҫР¶РөСӮ РҪР°РұР»СҺРҙР°СӮСҢСҒСҸ РІ РҫРҙРҪРҫРј РәР°РҙСҖРө, РҪРөРҫРұС…РҫРҙРёРјРҫ РІСӢРҝРҫР»РҪРёСӮСҢ СҖР°СҒСҮРөСӮ РөРө СҒРәРҫСҖРҫСҒСӮРё Рё РҫРҙРҪРҫРІСҖРөРјРөРҪРҪРҫ РҝРҫР»РҫР¶РөРҪРёСҸ СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј РјР°СӮСҖРёСҮРҪСӢС… РІСӢСҮРёСҒР»РөРҪРёР№. Р’ РҪР°СҮалРө РҝСҖРҫСҶРөСҒСҒР° филСҢСӮСҖ РёРҪРёСҶРёРёСҖСғРөСӮСҒСҸ РҪР° РҝРҫР»РҫР¶РөРҪРёРө РҫРұСҠРөРәСӮР° РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РјРҫРҙРөли С„РҫРҪР°. ДлСҸ РәажРҙРҫРіРҫ РәР°РҙСҖР°, РІ РәРҫСӮРҫСҖРҫРј РҫСӮСҒР»РөживаРөСӮСҒСҸ РҫРұСҠРөРәСӮ, филСҢСӮСҖ РҝСҖРөРҙСҒРәазСӢРІР°РөСӮ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫРө РҝРҫР»РҫР¶РөРҪРёРө РҫРұСҠРөРәСӮР° РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РІ РҝРҫСҒР»РөРҙСғСҺСүРөРј РәР°РҙСҖРө. Р•СҒли РІ РҝРҫСҒР»РөРҙСғСҺСүРөРј РәР°РҙСҖРө СҒСҶРөРҪР° РҝРөСҖРөРјРөСүР°РөСӮСҒСҸ, филСҢСӮСҖ Р»РҫРәализСғРөСӮ РҫРұСҠРөРәСӮ Рё РәРҫСҖСҖРөРәСӮРёСҖСғРөСӮ СӮСҖР°РөРәСӮРҫСҖРёСҺ.
2-Р№ СҚСӮР°Рҝ РІ РҫСӮСҒР»РөживаРҪРёРё РІРәР»СҺСҮР°РөСӮ РІ СҒРөРұСҸ СҒРҫРөРҙРёРҪРөРҪРёРө РҙР°РҪРҪСӢС…, РәРҫСӮРҫСҖСӢРө РҫРҝСҖРөРҙРөР»СҸСҺСӮ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРө РҫРұСҠРөРәСӮРҫРІ РІ РҝСҖРөРҙРөлах РәР°РҙСҖРҫРІ РҪР° РұазРө РҫРҙРёРҪР°РәРҫРІСӢС… РҫСҒРҫРұРөРҪРҪРҫСҒСӮРөР№. РазмРөСҖ, С„РҫСҖРјР° Рё СҖР°СҒРҝРҫР»РҫР¶РөРҪРёРө РҫРұСҠРөРәСӮР° РјРҫРіСғСӮ РұазиСҖРҫРІР°СӮСҢСҒСҸ РҪР° РҫРіСҖР°РҪРёСҮРёРІР°СҺСүРёС… РҝСҖСҸРјРҫСғРіРҫР»СҢРҪРёРәах Рё РёС… РҝРөСҖРөРәСҖСӢСӮРёСҸС… РҫСӮ РәР°РҙСҖР° Рә РәР°РҙСҖСғ. ГиСҒСӮРҫРіСҖаммСӢ, СҒРІСҸР·СӢРІР°СҺСүРёРө СҖазлиСҮРҪСӢРө РҫРұСҠРөРәСӮСӢ СҒ РёС… СҶРІРөСӮРҫРј, Рё СҒРәРҫСҖРҫСҒСӮСҢ СҸРІР»СҸСҺСӮСҒСҸ главРҪСӢРј Р°СҒРҝРөРәСӮРҫРј РІ РҝСҖРөРҙСҒРәазаРҪРёРё СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј филСҢСӮСҖР° РҡалСҢРјР°РҪР°. РһРҙРҪР°РәРҫ СӮРө или РёРҪСӢРө РҫСҒРҫРұРөРҪРҪРҫСҒСӮРё РјРҫРіСғСӮ РјРөРҪСҸСӮСҢСҒСҸ.
РқР°РҝСҖРёРјРөСҖ, РұРөР»СӢР№ РіСҖСғР·РҫРІРёРәРө РәСҖР°СҒРҪРҫР№ РәР°РұРёРҪРҫР№ РҝСҖРёРұлижаРөСӮСҒСҸ Рә РәамРөСҖРө РІРҙРҫР»СҢ СғлиСҶСӢ, РІСҠРөзжаРөСӮ СҮР° РҝРҫРҙСҠРөР·РҙРҪСғСҺ РҙРҫСҖРҫРіСғ, СҖазвРҫСҖР°СҮРёРІР°РөСӮСҒСҸ Рё СғС…РҫРҙРёСӮ РІ РҝСҖРҫСӮРёРІРҫРҝРҫР»РҫР¶РҪРҫРј РҪР°РҝСҖавлРөРҪРёРё. Р’СҒРө РҫСҒРҫРұРөРҪРҪРҫСҒСӮРё РҫРұСҠРөРәСӮР° РјРөРҪСҸСҺСӮСҒСҸ РІ С…РҫРҙРө СҒСҶРөРҪСӢ: СҖазмРөСҖСӢ, С„РҫСҖРјР°, СҒРәРҫСҖРҫСҒСӮСҢ Рё СҶРІРөСӮ. РҹСҖРҫРіСҖаммРҪРҫРө РҫРұРөСҒРҝРөСҮРөРҪРёРө РҙРҫлжРҪРҫ РұСӢСӮСҢ РҝСҖРёСҒРҝРҫСҒРҫРұР»РөРҪРҫ Рә СӮР°РәРёРј РёР·РјРөРҪРөРҪРёСҸРј РҙР»СҸ СӮРҫСҮРҪРҫР№ РёРҙРөРҪСӮифиРәР°СҶРёРё РіСҖСғР·РҫРІРёРәР°. РҡСҖРҫРјРө СӮРҫРіРҫ, РөСҒли РҪРөРҫРұС…РҫРҙРёРјРҫ РҫСӮСҒР»РөживаСӮСҢ РҪРөСҒРәРҫР»СҢРәРҫ РҫРұСҠРөРәСӮРҫРІ, РҝСҖРҫРіСҖаммРҪРҫРө РҫРұРөСҒРҝРөСҮРөРҪРёРө РҙРҫлжРҪРҫ РҙаваСӮСҢ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РёС… СҖазлиСҮРөРҪРёСҸ.
РҡлаСҒСҒифиРәР°СҶРёСҸ
РЎР»РҫР¶РҪРҫСҒСӮРё РҫСӮСҒР»РөживаРҪРёСҸ РҝСҖРёРІРҫРҙСҸСӮ Рә РҝСҖРҫРұР»Рөмам, СҒРІСҸР·Р°РҪРҪСӢРј СҒ РәлаСҒСҒифиРәР°СҶРёРөР№ РҫРұСҠРөРәСӮРҫРІ. РқР°РҝСҖРёРјРөСҖ, РҙР»СҸ СҒРёСҒСӮРөРјСӢ РҝСҖРҫСүРө РҙаваСӮСҢ СҒРёРіРҪал СӮСҖРөРІРҫРіРё, РөСҒли СҮСӮРҫ-лиРұРҫ РҝРөСҖРөСҒРөРәР°РөСӮ лиРҪРёСҺ РҝРөСҖРөРҙ РәамРөСҖРҫР№, Р° РҪРө РәРҫРіРҙР° РҫРұСҠРөРәСӮ, РҝРҫС…Рҫжий РҪР° СҮРөР»РҫРІРөРәР°, РҝРөСҖРөСҒРөРәР°РөСӮ лиРҪРёСҺ. РазмРөСҖСӢ РҫРұСҠРөРәСӮР° Рё РөРіРҫ СҒРәРҫСҖРҫСҒСӮСҢ РјРҫРіСғСӮ РҫРұРөСҒРҝРөСҮРёСӮСҢ РІРөРәСӮРҫСҖ РҙР»СҸ РіСҖСғРұРҫР№ РәлаСҒСҒифиРәР°СҶРёРё, РҪРҫ РҙР»СҸ РұРҫР»СҢСҲРөР№ СӮРҫСҮРҪРҫСҒСӮРё СӮСҖРөРұСғРөСӮСҒСҸ РҝРҫРҙСҖРҫРұРҪР°СҸ РёРҪС„РҫСҖРјР°СҶРёСҸ. РҡСҖСғРҝРҪСӢРө РҫРұСҠРөРәСӮСӢ РҫРұРөСҒРҝРөСҮРёРІР°СҺСӮ РұРҫР»СҢСҲРө РҝРёРәСҒРөР»РөР№ РёРҪС„РҫСҖРјР°СҶРёРё, С…РҫСӮСҸ РёС… РјРҫР¶РөСӮ РұСӢСӮСҢ СҒлиСҲРәРҫРј РјРҪРҫРіРҫ РҙР»СҸ РІСӢРҝРҫР»РҪРөРҪРёСҸ РұСӢСҒСӮСҖРҫР№ РәлаСҒСҒифиРәР°СҶРёРё. Р’ СҚСӮРҫРј СҒР»СғСҮР°Рө СӮСҖРөРұСғРөСӮСҒСҸ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө СӮРөС…РҪРёРәРё СҖазмРөСҖРҪРҫРіРҫ СғРјРөРҪСҢСҲРөРҪРёСҸ РҙР»СҸ СҖРөР°РәСҶРёРё РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё, С…РҫСӮСҸ РұРҫР»РөРө РҝРҫР·РҙРҪРёРө РёСҒСҒР»РөРҙРҫРІР°РҪРёСҸ РҝРҫР·РІРҫР»СҸСҺСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РҝРҫР»РҪСғСҺ РҝРёРәСҒРөР»СҢРҪСғСҺ РёРҪС„РҫСҖРјР°СҶРёСҺ РёР· Р·Р°РҝРёСҒР°РҪРҪСӢС… РІ РҝамСҸСӮСҢ РәР°РҙСҖРҫРІ.
РӯффРөРәСӮРёРІРҪР°СҸ СҖРөализаСҶРёСҸ CAB СҒРІСҸР·Р°РҪР° СҒ РҝСҖРөРҫРҙРҫР»РөРҪРёРөРј РұРҫР»СҢСҲРҫРіРҫ РәРҫлиСҮРөСҒСӮРІР° РҝСҖРҫРұР»РөРј РҝРҫРјРёРјРҫ РәлаСҒСҒифиРәР°СҶРёРё РҫРұСҠРөРәСӮР°. РЎСҺРҙР° РҫСӮРҪРҫСҒСҸСӮСҒСҸ РёР·РјРөРҪРөРҪРёСҸ СғСҖРҫРІРҪРөР№ СҒРІРөСӮР° РҝРҫ РҝСҖРёСҮРёРҪРө РҪР°СҒСӮСғРҝР»РөРҪРёСҸ РҪРҫСҮРё, РІРҫРҙРҪРҫР№ РҝРҫРІРөСҖС…РҪРҫСҒСӮРё, РҫРұлаРәРҫРІ, РІРөСӮСҖР° РІ РҙРөСҖРөРІСҢСҸС…, СҒРҪРөРіР° Рё СӮСғРјР°РҪР°; РҫСӮСҒР»РөживаРҪРёРө СӮСҖР°РөРәСӮРҫСҖРёР№ РҙРІРёР¶РөРҪРёСҸ РҫРұСҠРөРәСӮРҫРІ, РәРҫСӮРҫСҖСӢРө РҝРөСҖРөСҒРөРәР°СҺСӮСҒСҸ, РІСӢР·СӢРІР°СҸ РҫСӮ РәажРҙРҫРіРҫ РҝРёРәСҒРөли РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°, РәРҫСӮРҫСҖСӢРө СҒРәРҫСҖРөРө СҒливаСҺСӮСҒСҸ, СҮРөРј СҖазРҙРөР»СҸСҺСӮСҒСҸ; РҫСӮСҒР»РөживаРҪРёРө РҫРұСҠРөРәСӮРҫРІ СҒ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪСӢРј РҝСҖРҫСҒРјРҫСӮСҖРҫРј РІ РјРҪРҫРіРҫРәамРөСҖРҪСӢС… СҒРёСҒСӮРөмах. Р РөСҲРөРҪРёРө СғРәазаРҪРҪСӢС… РҝСҖРҫРұР»РөРј РІ CAB РІСҒРө РөСүРө РҝСҖРҫРҙРҫлжаРөСӮСҒСҸ.
РҡРҫРҪСҒСӮСҖСғРёСҖРҫРІР°РҪРёРө CAB
Р РөализаСҶРёСҸ CAB Рё РІРёРҙРөРҫРәРҫРҙРёСҖРҫРІР°РҪРёСҸ СӮСҖРөРұСғРөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІСғСҺСүРөРіРҫ РҝСҖРҫСҶРөСҒСҒРҫСҖР° Рё СҖазРҪРҫРҫРұСҖазРҪРҫРіРҫ РҫСҒРҪР°СүРөРҪРёСҸ. РҹРҫСҸРІР»РөРҪРёРө РҪРҫРІСӢС… Р°РҪалиСӮРёСҮРөСҒРәРёС… РјРөСӮРҫРҙРҫРІ РҪСғР¶РҙР°РөСӮСҒСҸ РІ РіРёРұРәРҫСҒСӮРё РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёСҸ. РӯСӮРҫ РјРҫР¶РөСӮ РұСӢСӮСҢ СҖРөализРҫРІР°РҪРҫ РҝСҖРё РҝРҫРјРҫСүРё РҝСҖРҫСҶРөСҒСҒРҫСҖРҫРІ, РәРҫСӮРҫСҖСӢРө РёРҪСӮРөРіСҖРёСҖСғСҺСӮ РҪаивСӢСҒСҲСғСҺ РҝСҖРҫРёР·РІРҫРҙРёСӮРөР»СҢРҪРҫСҒСӮСҢ СҒ РҝСҖРҫРіСҖаммиСҖСғРөРјСӢРј СҸРҙСҖРҫРј РҰРһРЎ Рё СҸРҙСҖРҫРј RISC РјРёРәСҖРҫРҝСҖРҫСҶРөСҒСҒРҫСҖР° РІ РҙРҫРұавлРөРҪРёРө Рә РІРёРҙРөРҫР°РҝРҝР°СҖР°СӮРҪСӢРј СҒРҫРҝСҖРҫСҶРөСҒСҒРҫСҖам. РқРөРҫРұС…РҫРҙРёРјР° СӮР°РәР¶Рө РёРҪСӮРөРіСҖР°СҶРёСҸ СҒРІСҸР·РҪСӢС… РҝРөСҖРёС„РөСҖРёР№РҪСӢС… СғСҒСӮСҖРҫР№СҒСӮРІ СҒ РІСӢСҒРҫРәРҫР№ СҒРәРҫСҖРҫСҒСӮСҢСҺ РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС… Рё СҶРөРҝРё РҙР»СҸ РҝРөСҖРөРҙР°СҮРё РІРёРҙРөРҫСҒРёРіРҪалРҫРІ РҙР»СҸ СғРјРөРҪСҢСҲРөРҪРёСҸ РәРҫлиСҮРөСҒСӮРІР° СҒРёСҒСӮРөРјРҪСӢС… РәРҫРјРҝРҫРҪРөРҪСӮРҫРІ Рё СҒСӮРҫРёРјРҫСҒСӮРё, РәР°РәСҚСӮРҫ РІСӢРҝРҫР»РҪРөРҪРҫ РҪР° РҝСҖРҫСҶРөСҒСҒРҫСҖах TMS320DM644x РҪР° РұазРө СӮРөС…РҪРҫР»РҫРіРёРё DaVinci (РұР»РҫРә-РҙиагСҖамма РҪР° СҖРёСҒ. 3).
Два РҝСҖРҫСҶРөСҒСҒРҫСҖР° DaVinci РјРҫРіСғСӮ РҫРұРөСҒРҝРөСҮРёСӮСҢ РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёРө, РҪРөРҫРұС…РҫРҙРёРјРҫРө РҙР»СҸ СҖР°РұРҫСӮСӢ СҖР°РҪРҪРёС… РјРҫРҙРөР»РөР№ CAB, Рё РәРҫРҙРёСҖРҫРІР°РҪРёРө РёСҒСӮРҫСҮРҪРёРәР° РІРёРҙРөРҫ СҒ СҖазСҖРөСҲРөРҪРёРөРј 720x1080 (HD) Рё СҒРәРҫСҖРҫСҒСӮСҢСҺ 30 РәР°РҙСҖ/СҒ.
РңРҪРҫРіРҫСҸРҙРөСҖРҪСӢРө РҝСҖРҫСҶРөСҒСҒРҫСҖСӢ (РҰРһРЎ - RISC) РҝСҖРөРҙРҫСҒСӮавлСҸСҺСӮ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫРө РҝСҖРөРёРјСғСүРөСҒСӮРІРҫ РұлагРҫРҙР°СҖСҸ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҺ РәажРҙРҫРіРҫ СҸРҙСҖР° РҙР»СҸ РІСӢРҝРҫР»РҪРөРҪРёСҸ Р·Р°РҙР°СҮ РҪаилСғСҮСҲРёРј РҫРұСҖазРҫРј: С„СғРҪРәСҶРёРё РәРҫРҙРөРәР° Рё РҝСҖРҫСҮРёРө С„СғРҪРәСҶРёРё РҫРұСҖР°РұРҫСӮРәРё СҒРёРіРҪала РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮ РҰРһРЎ, СҒРёСҒСӮРөРјРҪСӢР№ РәРҫРҪСӮСҖРҫР»СҢ Рё РҝРҫР»СҢР·РҫРІР°СӮРөР»СҢСҒРәРёР№ РёРҪСӮРөСҖС„РөР№СҒ РІСӢРҝРҫР»РҪСҸРөСӮ RISC-РҝСҖРҫСҶРөСҒСҒРҫСҖ. Р’РҫР·РјРҫР¶РҪРҫСҒСӮРё РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёСҸ RISC-РҝСҖРҫСҶРөСҒСҒРҫСҖР° РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РҙР»СҸ РәРҫРҪСӮСҖРҫР»СҸ РІСӢСҒРҫРәРҫРіРҫ РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёСҸ РҰРһРЎ-РҝСҖРҫСҶРөСҒСҒРҫСҖР°, РҫРұРөСҒРҝРөСҮРёРІР°СҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮРё РҙалСҢРҪРөР№СҲРөРіРҫ СҖазвиСӮРёСҸ Рё РёРҪСӮРөРіСҖР°СҶРёРё РҪР° Р»СҺРұРҫРј СғСҖРҫРІРҪРө (РҫСӮ РҝСҖРёРјРөРҪРөРҪРёР№ РІСӢСҒРҫРәРҫРіРҫ СғСҖРҫРІРҪСҸ РҙРҫ СҖазвиСӮСӢС… РәРҫРҙРөРәРҫРІ). РҳСҒРҝРҫР»СҢР·СғСҸ СӮР°РәРёРө РјРҪРҫРіРҫСҸРҙРөСҖРҪСӢРө РәРҫРҪСҒСӮСҖСғРәСҶРёРё, РёР·РіРҫСӮРҫРІРёСӮРөли РҝСҖРҫРјСӢСҲР»РөРҪРҪСӢС… РІРёРҙРөРҫСғСҒСӮСҖРҫР№СҒСӮРІ РҝРҫР»СғСҮР°СҺСӮ РІРҫР·РјРҫР¶РҪРҫСҒСӮРё СҒРҫР·РҙаваСӮСҢ СҲРёСҖРҫРәРёР№ РҙРёР°РҝазРҫРҪ РёР·РҙРөлий СҒ РІСӢСҒРҫРәРёРј РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёРөРј, РіРёРұРәРҫСҒСӮСҢСҺ, Р»РөРіРәРҫСҒСӮСҢСҺ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ, СҮСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ СҒРҫРәСҖР°СӮРёСӮСҢ РІСҖРөРјСҸ СҖазСҖР°РұРҫСӮРәРё Рё СҒСӮРҫРёРјРҫСҒСӮСҢ РҝСҖРҫРёР·РІРҫРҙСҒСӮРІР° Рё РІ СҒРІРҫСҺ РҫСҮРөСҖРөРҙСҢ РҫСӮРәСҖСӢРІР°РөСӮ РІРҫР·РјРҫР¶РҪРҫСҒСӮРё РҙР»СҸ РҪРҫРІСӢС… РҝСҖРёРјРөРҪРөРҪРёР№.
РЎ РҪРөР·РҪР°СҮРёСӮРөР»СҢРҪРҫР№ РјРҫРҙифиРәР°СҶРёРөР№ РәРҫРҪСҒСӮСҖСғРәСҶРёСҸ РјРҫР¶РөСӮ РұСӢСӮСҢ РҝРөСҖРөСҒСӮСҖРҫРөРҪР° РҪР° РҫРҙРҪРҫРҝлаСӮРҪСӢР№ РІР°СҖРёР°РҪСӮ РҪР° РұазРө РҫРҙРҪРҫРіРҫ РҝСҖРҫСҶРөСҒСҒРҫСҖР°, РҫРұРөСҒРҝРөСҮРёРІР°СҺСүРёР№ СӮРө Р¶Рө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё, СҮСӮРҫ Рё Сғ 2-РҝСҖРҫСҶРөСҒСҒРҫСҖРҪРҫР№ РІРөСҖСҒРёРё СҒРҫ СҒСҖРөРҙРҪРёРј СғСҖРҫРІРҪРөРј CAB Рё РәРҫРҙРёСҖРҫРІР°РҪРёСҸ.
РҹСҖРё РҝСҖРёРјРөРҪРөРҪРёРё СғРәазаРҪРҪРҫРіРҫ СҒРҝРҫСҒРҫРұР° РёРҪСӮРөРіСҖР°СҶРёРё CAB СҒ РәамРөСҖРҫР№ РјРҫР¶РҪРҫ РҫРұРөСҒРҝРөСҮРёСӮСҢ СҖРөализаСҶРёСҺ РҪР°РҙРөР¶РҪРҫР№ Рё СҚффРөРәСӮРёРІРҪРҫР№ С„РҫСҖРјСӢ СҒРөСӮРё. РҹСҖРҫРіСҖаммРҪРҫРө РҫРұРөСҒРҝРөСҮРөРҪРёРө CAB РјРҫР¶РөСӮ РұСӢСӮСҢ СӮР°РәР¶Рө РёРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҫ СҒ РҹРҡ, РәРҫСӮРҫСҖСӢРө СҒР»СғжаСӮ РІ РәР°СҮРөСҒСӮРІРө РәРҫРҪСҶРөРҪСӮСҖРёСҖСғСҺСүРёС… СғСҒСӮСҖРҫР№СҒСӮРІ РҙР»СҸ РјРҪРҫРіРҫСҮРёСҒР»РөРҪРҪСӢС… РәамРөСҖ. РҡСҖРҫРјРө СҒРҫРұСҒСӮРІРөРҪРҪРҫРіРҫ РҝРҫСӮРҫРәР° CAB Р·РҙРөСҒСҢ РјРҫРіСғСӮ РҝРҫРҪР°РҙРҫРұРёСӮСҢСҒСҸ РҫРҝРөСҖР°СҶРёРё РҝСҖРөРҙРІР°СҖРёСӮРөР»СҢРҪРҫР№ РҫРұСҖР°РұРҫСӮРәРё РҙР°РҪРҪСӢС…, РәРҫСӮРҫСҖСӢРө РҫСҒСғСүРөСҒСӮРІР»СҸСҺСӮ РІРҫР·РІСҖР°СӮ РҫСҮРөСҖРөРҙРҪРҫСҒСӮРё РҙРҫ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°/С„РҫРҪР° Рё РҙСҖСғРіРёРө Р°РҪалиСӮРёСҮРөСҒРәРёРө РҫРҝРөСҖР°СҶРёРё. РҹСҖРёРәлаРҙРҪРҫРө РҹРһ РјРҫР¶РөСӮ РІРҪРөСҒСӮРё РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢРө РҫРҝРөСҖР°СҶРёРё РҙР»СҸ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫРұСҠРөРәСӮР° Рё РҙСҖСғРіРёС… СҶРөР»РөР№.
ДлСҸ СғСҒРҝРөСҲРҪРҫР№ СҖР°РұРҫСӮСӢ CAB РёСҒРәР»СҺСҮРёСӮРөР»СҢРҪРҫРө Р·РҪР°СҮРөРҪРёРө РҝСҖРёРҫРұСҖРөСӮР°СҺСӮ РҝРҫСҒР»РөРҙРҪРёРө СӮРөРҪРҙРөРҪСҶРёРё РІ РҫРұлаСҒСӮРё СҒРёСҒСӮРөРј РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ. ВажРҪРҫРө Р·РҪР°СҮРөРҪРёРө РёРјРөСҺСӮ РәРҫРҙРөРәРё, РҙР»СҸ РәРҫСӮРҫСҖСӢС… РІСӢСҖР°РұРҫСӮР°РҪСӢ СӮСҖРөРұРҫРІР°РҪРёСҸ: РҪРёР·РәР°СҸ Р·Р°РҙРөСҖР¶РәР°, РІСӢСҒРҫРәР°СҸ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ СҒжаСӮРёСҸ, РіРёРұРәРҫСҒСӮСҢ СҖазСҖРөСҲРөРҪРёСҸ Рё СҮР°СҒСӮРҫСӮСӢ РәР°РҙСҖРҫРІ, РҪРөРІСӢСҒРҫРәР°СҸ СҒР»РҫР¶РҪРҫСҒСӮСҢ Рё РҪРёР·РәР°СҸ СҒСӮРҫРёРјРҫСҒСӮСҢ. РҳР· РІСҒРөС… РёР·РІРөСҒСӮРҪСӢС… РІР°СҖРёР°РҪСӮРҫРІ РәРҫРҙРөРәРҫРІ РҪаиРұРҫР»РөРө РәРҫРјРҝСҖРҫРјРёСҒСҒРҪСӢРј РІР°СҖРёР°РҪСӮРҫРј СҸРІР»СҸРөСӮСҒСҸ РұазРҫРІСӢР№ РІР°СҖРёР°РҪСӮ Рқ.264 (Рқ.264 Baseline profile), РҫРҙРҪР°РәРҫ Рё Сғ РҪРөРіРҫ РҫСӮСҒСғСӮСҒСӮРІСғРөСӮ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫСҒСӮСҢ, РҪРөРҫРұС…РҫРҙРёРјР°СҸ РҙР»СҸ РҝСҖРёРјРөРҪРөРҪРёР№ РҪР°РұР»СҺРҙРөРҪРёСҸ. Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ СҖазСҖР°РұРҫСӮР°РҪ РјР°СҒСҲСӮР°РұРёСҖСғРөРјСӢР№ РІРёРҙРөРҫРәРҫРҙРөРә Scalable Video codec (SVC), РҝСҖРөРҙСҒСӮавлСҸСҺСүРёР№ СҒРҫРұРҫР№ СҖР°СҒСҲРёСҖРөРҪРёРө СҒСғСүРөСҒСӮРІСғСҺСүРөРіРҫ СҒСӮР°РҪРҙР°СҖСӮР° Рқ.264. SVC РұСӢР» СҖазСҖР°РұРҫСӮР°РҪ СҒ СҶРөР»СҢСҺ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РҫРҙРҪРҫРіРҫ РәРҫРҙРёСҖРҫРІР°РҪРҪРҫРіРҫ РҝРҫСӮРҫРәР° РҙР°РҪРҪСӢС… РҙР»СҸ СғРҙРҫРІР»РөСӮРІРҫСҖРөРҪРёСҸ СҖазлиСҮРҪСӢС… СӮСҖРөРұРҫРІР°РҪРёР№: РұРёСӮРҫРІРҫР№ СҒРәРҫСҖРҫСҒСӮРё РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС…, РәР°СҮРөСҒСӮРІР° Рё СҖазСҖРөСҲРөРҪРёСҸ. SVC РҝРҫРҙРҙРөСҖживаРөСӮ РІСӢСҒРҫРәСғСҺ СҒСӮРөРҝРөРҪСҢ РјР°СҒСҲСӮР°РұРёСҖРҫРІР°РҪРёСҸ, РәРҫСӮРҫСҖРҫРө РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫ, РҙРҫРҝСғСҒРәР°СҸ СҖазлиСҮРҪСӢРө СҖазСҖРөСҲРөРҪРёСҸ РҫСӮРҫРұСҖажРөРҪРёСҸ. РңР°СҒСҲСӮР°РұРёСҖРҫРІР°РҪРёРө РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ СӮР°РәР¶Рө РІРҫ РІСҖРөРјРөРҪРё, РҫРұРөСҒРҝРөСҮРёРІР°СҸ РёР·РјРөРҪРөРҪРёРө СҮР°СҒСӮРҫСӮСӢ РәР°РҙСҖРҫРІ РҝРҫ РәР°СҮРөСҒСӮРІСғ Рё РёР·РјРөРҪРөРҪРёРө РҫРәРҫРҪСҮР°СӮРөР»СҢРҪРҫРіРҫ РәР°СҮРөСҒСӮРІР° РёР·РҫРұСҖажРөРҪРёСҸ. РқР°РҝСҖРёРјРөСҖ, Рқ.264 SVC-РІРёРҙРөРҫРҝРҫСӮРҫРә РјРҫР¶РөСӮ РұСӢСӮСҢ РҙРөРәРҫРҙРёСҖРҫРІР°РҪ РҙРІСғРјСҸ СҖазлиСҮРҪСӢРјРё РҝСҖРёРұРҫСҖами СҒ СҖазлиСҮРҪСӢРјРё СҮР°СҒСӮРҫСӮРҫР№ РәР°РҙСҖРҫРІ Рё СҖазСҖРөСҲРөРҪРёСҸРјРё. РҳСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө SVC РҝСҖРөРҙРҫСҒСӮавлСҸРөСӮ Р·РҪР°СҮРёСӮРөР»СҢРҪСӢРө РІСӢРіРҫРҙСӢ РҝРҫР»СҢР·РҫРІР°СӮРөР»СҺ: РҫРұР»РөРіСҮР°РөСӮСҒСҸ Р°РҙР°РҝСӮР°СҶРёСҸ РҙР»СҸ СҖазлиСҮРҪСӢС… РҙРёСҒРҝР»РөРөРІ, РҝРөСҖРөРҙР°СҮР°, С…СҖР°РҪРөРҪРёРө Рё РҫСӮРҫРұСҖажРөРҪРёРө РҙР° РёРҪСӢС… СҒ СҒРҫС…СҖР°РҪРөРҪРёРөРј СҖРөСҒСғСҖСҒРҫРІ, РҝРҫРІСӢСҲРөРҪРҪР°СҸ РҪР°РҙРөР¶РҪРҫСҒСӮСҢ РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС…, Р»РөРіРәРҫСҒСӮСҢ РҝРҫРҙРҙРөСҖР¶РәРё РіРөСӮРөСҖРҫРіРөРҪРҪРҫР№ СҒРөСӮРё. Р”РҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢРј РҝСҖРөРёРјСғСүРөСҒСӮРІРҫРј СҸРІР»СҸРөСӮСҒСҸ СӮРҫ, СҮСӮРҫ СҒжимаРөРјСӢР№ РҝРҫСӮРҫРә РјРҫР¶РөСӮ РұСӢСӮСҢ РҝСҖРҫР°РҪализиСҖРҫРІР°РҪ РҝСҖРё РҫРҙРҪРҫРІСҖРөРјРөРҪРҪРҫР№ Р·Р°РҝРёСҒРё РҪР° РҙРёСҒРә. ЧаСҒСӮСҢ файлРҫРІ, РәРҫСӮРҫСҖСӢРө РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РҙР»СҸ РҝРөСҖРөСҒСӮСҖРҫР№РәРё РІСӢСҒРҫРәРҫР№ СҮР°СҒСӮРҫСӮСӢ РәР°РҙСҖРҫРІ или РёР·РҫРұСҖажРөРҪРёР№ РІСӢСҒРҫРәРҫРіРҫ РәР°СҮРөСҒСӮРІР°, РјРҫРіСғСӮ РұСӢСӮСҢ РҝРҫСҒСӮРөРҝРөРҪРҪРҫ СҒСӮРөСҮРөРҪРёРөРј РІСҖРөРјРөРҪРё СғРҙалРөРҪСӢ. Р’РҫР·РјРҫР¶РҪСӢ СҒР»РөРҙСғСҺСүРёРө РІР°СҖРёР°РҪСӮСӢ РјР°СҒСҲСӮР°РұРёСҖРҫРІР°РҪРёСҸ:
РЎ СӮРҫСҮРәРё Р·СҖРөРҪРёСҸ СғРјРөРҪСҢСҲРөРҪРёСҸ РҝРҫСӮРөСҖСҢ СҒСӮР°РҪРҙР°СҖСӮ Рқ.264 SVC РҝСҖРөРҙРҫСҒСӮавлСҸРөСӮ СҒР»РөРҙСғСҺСүРёРө РІРҫР·РјРҫР¶РҪСӢРө РҝСҖРөРёРјСғСүРөСҒСӮРІР° РҝРҫ СҒСҖавРҪРөРҪРёСҺ СҒ РҫРҙРҪРҫСҒР»РҫР№РҪСӢРј РәРҫРҙРёСҖРҫРІР°РҪРёРөРј.
- Р’РҫР·РјРҫР¶РҪРҫСҒСӮСҢ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РёРөСҖР°СҖС…РёСҮРөСҒРәРёС… СҒСӮСҖСғРәСӮСғСҖ РҝСҖРөРҙСҒРәазаРҪРёСҸ РҙР»СҸ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ РІСҖРөРјРөРҪРҪРҫР№ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫСҒСӮРё СҒ РҪРөСҒРәРҫР»СҢРәРёРјРё СҒР»РҫСҸРјРё РҝСҖРё РҫРҙРҪРҫРІСҖРөРјРөРҪРҪРҫРј СғР»СғСҮСҲРөРҪРёРё СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РәРҫРҙРёСҖРҫРІР°РҪРёСҸ Рё РҝРҫРІСӢСҲРөРҪРёРё СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РәР°СҮРөСҒСӮРІРөРҪРҪРҫРіРҫ Рё РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫРіРҫ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫРіРҫ РәРҫРҙРёСҖРҫРІР°РҪРёСҸ.
- РқРҫРІСӢРө РјРөСӮРҫРҙСӢ РјРөР¶СҒР»РҫР№РҪРҫРіРҫ РҝСҖРөРҙСҒРәазаРҪРёСҸ РҙРІРёР¶РөРҪРёСҸ Рё РҫСҒСӮР°СӮРҫСҮРҪРҫРө СғР»СғСҮСҲРөРҪРёРө СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РәРҫРҙРёСҖРҫРІР°РҪРёСҸ СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫРіРҫ РјР°СҒСҲСӮР°РұРёСҖРҫРІР°РҪРёСҸ Рё РәР°СҮРөСҒСӮРІРөРҪРҪРҫРіРҫ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫРіРҫ РәРҫРҙРёСҖРҫРІР°РҪРёСҸ.
- РҡРҫРҪСҶРөРҝСҶРёСҸ РәР»СҺСҮРөРІСӢС… СҖРёСҒСғРҪРәРҫРІ РҙР»СҸ СҚффРөРәСӮРёРІРҪРҫРіРҫ РәРҫРҪСӮСҖРҫР»СҸ СҒРјРөСүРөРҪРёСҸ РәР°СҮРөСҒСӮРІРөРҪРҪРҫРіРҫ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫРіРҫ РәРҫРҙРёСҖРҫРІР°РҪРёСҸ РҪР° РҫСҒРҪРҫРІРө РҝР°РәРөСӮРҫРІ СҒ РёРөСҖР°СҖС…РёСҮРөСҒРәРёРјРё СҒСӮСҖСғРәСӮСғСҖами РҝСҖРөРҙСҒРәазаРҪРёСҸ.
- Р”РөРәРҫРҙРёСҖРҫРІР°РҪРёРө РәРҫРјРҝРөРҪСҒР°СҶРёРҫРҪРҪРҫРіРҫ РәРҫРҪСӮСғСҖР° РҫРҙРёРҪРҫСҮРҪРҫРіРҫ РҙРІРёР¶РөРҪРёСҸ РҙР»СҸ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫРіРҫ Рё РәР°СҮРөСҒСӮРІРөРҪРҪРҫРіРҫ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫРіРҫ РәРҫРҙРёСҖРҫРІР°РҪРёСҸ, СҮСӮРҫ РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ СҒР»РҫР¶РҪРҫСҒСӮСҢ РҙРөРәРҫРҙРөСҖР°, РұлизРәСғСҺ СҒР»РҫР¶РҪРҫСҒСӮРё РҝСҖРё РҫРҙРҪРҫСҒР»РҫР№РҪРҫРј РәРҫРҙРёСҖРҫРІР°РҪРёРё.
- РҹРҫРҙРҙРөСҖР¶РәР° РјРҫРҙифиСҶРёСҖРҫРІР°РҪРҪРҫРіРҫ РҝСҖРҫСҶРөСҒСҒР° РҙРөРәРҫРҙРёСҖРҫРІР°РҪРёСҸ, РәРҫСӮРҫСҖСӢР№ РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РҝРөСҖРөР·Р°РҝРёСҒСҢ РҪРөРІСӢСҒРҫРәРҫРіРҫ СғСҖРҫРІРҪСҸ СҒР»РҫР¶РҪРҫСҒСӮРё РұРөР· РҝРҫСӮРөСҖСҢ РәР°СҮРөСҒСӮРІРөРҪРҪРҫРіРҫ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫРіРҫ СҖазСҖСҸРҙРҪРҫРіРҫ РҝРҫСӮРҫРәР°, РәРҫСӮРҫСҖСӢР№ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ РҪРөРјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫРјСғ РҝСҖРҫфилСҺ H.264/AVC.
Р’ СҒР»РөРҙСғСҺСүРёС… РҫРұлаСҒСӮСҸС… РҝСҖРёРјРөРҪРөРҪРёСҸ РјРҫР¶РөСӮ РұСӢСӮСҢ РҝРҫР»СғСҮРөРҪР° РІСӢРіРҫРҙР° РҫСӮ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ SVC: РҝРҫСӮРҫРәРҫРІРҫРө РІРёРҙРөРҫ, РІРёРҙРөРҫ/СӮРөР»РөРәРҫРҪС„РөСҖРөРҪСҶРёРё, РҪР°РұР»СҺРҙРөРҪРёРө, СҲРёСҖРҫРәРҫРІРөСүР°РҪРёРө, С…СҖР°РҪРөРҪРёРө.
Р§СӮРҫ РәР°СҒР°РөСӮСҒСҸ РёРҪСӮРөллРөРәСӮСғалСҢРҪРҫРіРҫ РІРёРҙРөРҫ, СӮРҫ РІРёРҙРөРҫР°РҪалиСӮРёРәР° РёРјРөРөСӮ РҙРөР»Рҫ СҒ алгРҫСҖРёСӮмами, РәРҫСӮРҫСҖСӢРө РҫРұРҪР°СҖСғживаСҺСӮ Рё РҫСӮСҒР»РөживаСҺСӮ РҫРұСҠРөРәСӮСӢ СҒ СӮРҫСҮРәРё Р·СҖРөРҪРёСҸ РІРҫР·РјРҫР¶РҪСӢС… СғРіСҖРҫР· или РҪР°СҖСғСҲРөРҪРёСҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё. РқР°РҝСҖРёРјРөСҖ, РІРёРҙРөРҫР°РҪалиСӮРёРәР° РҝРҫР·РІРҫР»СҸРөСӮ СҒР»РөРҙРёСӮСҢ Р·Р° СҮРөР»РҫРІРөРәРҫРј, СҒСӮСғРҝРёРІСҲРёРј РІ РҪРөСҖазСҖРөСҲРөРҪРҪСғСҺ Р·РҫРҪСғ, или Р·Р° СӮРөРјРё, РәСӮРҫ РҫСҒСӮавлСҸРөСӮ Рұагаж РІ РіРҫСҒСӮРёРҪРҫР№ Р°СҚСҖРҫРҝРҫСҖСӮР° РҪР° РҝРөСҖРёРҫРҙ РІСҖРөРјРөРҪРё, РәРҫСӮРҫСҖСӢР№ РҝСҖРөРІСӢСҲР°РөСӮ РҙРҫРҝСғСҒСӮРёРјСғСҺ РҝСҖРҫРҙРҫлжиСӮРөР»СҢРҪРҫСҒСӮСҢ. РһРұСӢСҮРҪРҫ СӮР°РәРёРө СҒР»СғСҮаи РІСӢР·СӢРІР°СҺСӮ РІСӢСҒСӢР»РәСғ РІРёРҙРөРҫСҒРёРіРҪала РҪР°РұР»СҺРҙР°СӮРөР»СҺ РҙР»СҸ РҙалСҢРҪРөР№СҲРёС… РёСҒСҒР»РөРҙРҫРІР°РҪРёР№.
РһСҒСғСүРөСҒСӮРІР»РөРҪРёРө РІРёРҙРөРҫР°РҪалиСӮРёРәРё РҝСҖРөРҙРҫСҒСӮавлСҸРөСӮ РјРҪРҫРіРҫ РҝСҖРөРёРјСғСүРөСҒСӮРІ РҫРҝРөСҖР°СӮРҫСҖам РҪР°РұР»СҺРҙРөРҪРёСҸ РўР°Рә РәР°Рә Р°РҪалиСӮРёРәР° РІСӢРҝРҫР»РҪСҸРөСӮСҒСҸ РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё, РҫРұРөСҒРҝРөСҮРёРІР°РөСӮСҒСҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮСҢ РҝРөСҖСҒРҫРҪала РҝРҫСҒСҖРөРҙСҒСӮРІРҫРј РҪРөРјРөРҙР»РөРҪРҪРҫРіРҫ РёР·РІРөСүРөРҪРёСҸ РҫРұ СғРіСҖРҫР·Рө. РҡСҖРҫРјРө СӮРҫРіРҫ, РҝСҖРҫРёСҒС…РҫРҙРёСӮ СғР»СғСҮСҲРөРҪРёРө РәР°СҮРөСҒСӮРІР° РҪР°РұР»СҺРҙРөРҪРёСҸ РҝРҫСҒСҖРөРҙСҒСӮРІРҫРј филСҢСӮСҖР°СҶРёРё Р°РәСӮРёРІРҪРҫСҒСӮРё, РҪРө РҝСҖРөРҙСҒСӮавлСҸСҺСүРөР№ РёРҪСӮРөСҖРөСҒР°. Рҳ, РІРҫР·РјРҫР¶РҪРҫ, СҒамСӢРј главРҪСӢРј СҸРІР»СҸРөСӮСҒСҸ СӮРҫ, СҮСӮРҫ Р°РҪалиСӮРёРәР° РҝРҫР·РІРҫР»СҸРөСӮ СғРјРөРҪСҢСҲРёСӮСҢ РәРҫлиСҮРөСҒСӮРІРҫ РҝРөСҖСҒРҫРҪала, РҪРөРҫРұС…РҫРҙРёРјРҫРіРҫ РҙР»СҸ СғРҝСҖавлРөРҪРёСҸ СҒРёСҒСӮРөРјРҫР№. РӯСӮРҫ РҫСҒРҫРұРөРҪРҪРҫ важРҪРҫ РҙР»СҸ СҒРёСҒСӮРөРј, РІ РәРҫСӮРҫСҖСӢС… РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РұРҫР»СҢСҲРҫРө РәРҫлиСҮРөСҒСӮРІРҫ РәамРөСҖ, РҪР°РҝСҖРёРјРөСҖ РІ РҫРұСүРөСҒСӮРІРөРҪРҪРҫРј СӮСҖР°РҪСҒРҝРҫСҖСӮРө Рё РұРҫР»СҢСҲРёС… Р·РҙР°РҪРёСҸС…. РҡСҖРҫРјРө СӮРҫРіРҫ, Р°РҪалиСӮРёРәР° РҝРҫР·РІРҫР»СҸРөСӮ СғРјРөРҪСҢСҲРёСӮСҢ СғСҒСӮалРҫСҒСӮСҢ РҫРҝРөСҖР°СӮРҫСҖР° РҝСҖРё СғР»СғСҮСҲРөРҪРёРё РәР°СҮРөСҒСӮРІР° РҪР°РұР»СҺРҙРөРҪРёСҸ.
Р’ РҝРҫСҒР»РөРҙРҪРөРө РІСҖРөРјСҸ РҝРҫР»СғСҮРёР»Рҫ СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪРёРө РёРҪСӮРөллРөРәСӮСғалСҢРҪРҫРө РәРҫРҙРёСҖРҫРІР°РҪРёРө, РІ РәРҫСӮРҫСҖРҫРј СҒРҫРІРјРөСүР°СҺСӮСҒСҸ СҒРёСӮСғР°СҶРёРҫРҪРҪР°СҸ РҫСҒРІРөРҙРҫРјР»РөРҪРҪРҫСҒСӮСҢ (СҮРөСҖРөР· РІРёРҙРөРҫР°РҪалиСӮРёРәСғ) Рё РіРёРұРәРҫРө РәРҫРҙРёСҖРҫРІР°РҪРёРө. РҡРҫРіРҙР° алгРҫСҖРёСӮРјСӢ РІРёРҙРөРҫР°РҪалиСӮРёРәРё РҫРұРҪР°СҖСғживаСҺСӮ РҙРІРёР¶РөРҪРёРө, РёР·РјРөРҪРөРҪРёРө СҒСҶРөРҪСӢ или РҙСҖСғРіСғСҺ РҝРҫСӮРөРҪСҶиалСҢРҪРҫ РҝРҫРҙРҫР·СҖРёСӮРөР»СҢРҪСғСҺ Р°РәСӮРёРІРҪРҫСҒСӮСҢ, РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢР№ РәРҫРҙРөСҖ РјРҫР¶РөСӮ РҪРө СӮРҫР»СҢРәРҫ СҒРҙРөлаСӮСҢ РјРөСӮРәСғ РҪР° СҒСҶРөРҪРө СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөРіРҫ СҒРҫСӮСҖСғРҙРҪРёРәР° РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё, РҪРҫ Рё СӮР°РәР¶Рө Р°РҙР°РҝСӮРёСҖРҫРІР°СӮСҢ РөРө РҙР»СҸ РәРҫРҙРёСҖРҫРІР°РҪРёСҸ. РқР°РҝСҖРёРјРөСҖ, РәРҫРіРҙР° РҫРұРҪР°СҖСғживаРөСӮСҒСҸ РҝРҫРҙРҫР·СҖРёСӮРөР»СҢРҪР°СҸ Р°РәСӮРёРІРҪРҫСҒСӮСҢ, РәРҫРҙРөСҖ РјРҫР¶РөСӮ СғРІРөлиСҮРёСӮСҢ СҮР°СҒСӮРҫСӮСғ РәР°РҙСҖРҫРІ, СҖазСҖРөСҲРөРҪРёРө Рё РәР°СҮРөСҒСӮРІРҫ РәРҫРҙРёСҖРҫРІР°РҪРёСҸ (СҖРёСҒ. 4).
РҹСҖРҫСҶРөСҒСҒРҫСҖСӢ, РёСҒРҝРҫР»СҢР·СғРөРјСӢРө РІ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРё, СҒСӮалРәРёРІР°СҺСӮСҒСҸ СҒ РјРҪРҫР¶РөСҒСӮРІРҫРј СҒР»РҫР¶РҪСӢС… РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… РҝСҖРҫРұР»РөРј. РһРҪРё РҙРҫлжРҪСӢ РІСӢРҝРҫР»РҪСҸСӮСҢ РҝРҫСҒСӮРҫСҸРҪРҪРҫ СғСҒР»РҫР¶РҪСҸСҺСүРёРөСҒСҸ Р·Р°РҙР°СҮРё РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё, СӮР°РәРёРө РәР°РәалгРҫСҖРёСӮРјСӢ РІРёРҙРөРҫР°РҪалиСӮРёРәРё, РҫРұСҒР»СғживаРҪРёРө РҙР°СӮСҮРёРәРҫРІ РІСӢСҒРҫРәРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ Рё СғРҝСҖавлРөРҪРёРө СҒРөСӮСҢСҺ. Р’СӢРҝРҫР»РҪРөРҪРёРө РІСҒРөРіРҫ СҚСӮРҫРіРҫ СӮСҖРөРұСғРөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ Р°СҖС…РёСӮРөРәСӮСғСҖСӢ СҒ РІСӢСҒРҫРәРёРј СғСҖРҫРІРҪРөРј РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёСҸ Рё РіРёРұРәРҫСҒСӮРё. Р РөСҲРөРҪРёРө Р·Р°РҙР°СҮРё РҝСҖРөРҙСҒСӮавлСҸРөСӮСҒСҸ РІ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРё РҝСҖРҫСҶРөСҒСҒРҫСҖР° СҒ РҝСҖРҫРіСҖаммРҪСӢРј РәРҫРҪфигСғСҖРёСҖРҫРІР°РҪРёРөРј.
Р’ РҝСҖРҫСҶРөСҒСҒРҫСҖРө СӮР°РәРҫРіРҫ СӮРёРҝР° СҒРҫРІРјРөСүР°СҺСӮСҒСҸ РҝСҖРҫРіСҖаммиСҖСғРөРјРҫРө РҝСҖРҫСҶРөСҒСҒРҫСҖРҪРҫРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ Рё РҝСҖРҫРіСҖаммиСҖСғРөРјР°СҸ СҒРёСҒСӮРөРјР° РәРҫРјРјСғСӮР°СҶРёРё Instruction Set Extension Fabric (ISEF). РҹРҫСҒР»РөРҙРҪСҸСҸ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ РҝСҖРҫРіСҖаммРҪРҫ-РәРҫРҪфигСғСҖРёСҖСғРөРјСғСҺ СҒРёСҒСӮРөРјСғ РәРҫРјРјСғСӮР°СҶРёРё, РәРҫСӮРҫСҖР°СҸ РҝРҫР·РІРҫР»СҸРөСӮ РәРҫРҪСҒСӮСҖСғРәСӮРҫСҖам СҒРёСҒСӮРөРјСӢ СҖР°СҒСҲРёСҖРёСӮСҢ РҪР°РұРҫСҖ РәРҫРјР°РҪРҙ РҝСҖРҫСҶРөСҒСҒРҫСҖР° Рё СҒС„РҫСҖРјСғлиСҖРҫРІР°СӮСҢ РҪРҫРІСӢРө РәРҫРјР°РҪРҙСӢ СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј РәРҫРҙР° C/C++. РӯСӮРё "РәРҫРјР°РҪРҙСӢ СҖР°СҒСҲРёСҖРөРҪРёСҸ" Р·Р°СӮРөРј авСӮРҫРјР°СӮРёСҮРөСҒРәРё СҒРёРҪСӮРөР·РёСҖСғСҺСӮСҒСҸ, СҖазмРөСүР°СҺСӮСҒСҸ Рё РҪР°РҝСҖавлСҸСҺСӮСҒСҸ РІ ISEF. РЎРёСҒСӮРөРјРҪСӢР№ РәРҫРҪСҒСӮСҖСғРәСӮРҫСҖ Р·Р°СӮРөРј РҫРҝСӮРёРјРёР·РёСҖСғРөСӮ РҪР°РұРҫСҖ РәРҫРјР°РҪРҙ РҝСҖРҫСҶРөСҒСҒРҫСҖР° РҙР»СҸ СҒРҝРөСҶифиСҮРөСҒРәРёС… РҝСҖРёР»РҫР¶РөРҪРёР№ РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё, СӮР°РәРёС… РәР°Рә РІРёРҙРөРҫРҫРұСҖР°РұРҫСӮРәР°, Р°РҪалиСӮРёРәР°, СғРҝСҖавлРөРҪРёРө СҒРөСӮСҢСҺ (СҖРёСҒ. 5). РўРөРҝРөСҖСҢ РәРҫРҪСҒСӮСҖСғРәСӮРҫСҖ РјРҫР¶РөСӮ СҖРөализРҫРІР°СӮСҢ СҮР°СҒСӮСҢ РҪСғР¶РҪРҫРіРҫ алгРҫСҖРёСӮРјР° Р°РҝРҝР°СҖР°СӮРҪСӢРј СҒРҝРҫСҒРҫРұРҫРј, РёСҒРҝРҫР»СҢР·СғСҸ ISEF, РәРҫСӮРҫСҖР°СҸ СҖР°СҒРҝРҫлагаРөСӮСҒСҸ РІ РҝСҖРөРҙРөлах СӮСҖР°РәСӮР° РҙР°РҪРҪСӢС… РҝСҖРҫСҶРөСҒСҒРҫСҖР°. РҹСҖРё СҚСӮРҫР№ Р°СҖС…РёСӮРөРәСӮСғСҖРө Р»РҫРіРёРәР° РәРҫРјР°РҪРҙ РҝСҖРҫСҶРөСҒСҒРҫСҖР°, Р° СӮР°РәР¶Рө РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢР№ РәРҫРјРҝРёР»СҸСӮРҫСҖ РјРҫРіСғСӮ РҝРҫР»РҪРҫСҒСӮСҢСҺ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ СғРәазаРҪРҪСӢРө Р°РҝРҝР°СҖР°СӮРҪСӢРө С„СғРҪРәСҶРёРё Рё РҪР°РҝСҖавлСҸСӮСҢ РёС… РІ РҝРҫСӮРҫРә РІСӢРҝРҫР»РҪРөРҪРёСҸ РәРҫРјР°РҪРҙ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #3, 2008
РҹРҫСҒРөСүРөРҪРёР№: 11714
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


