






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
ЧаСҒСӮСҢ 2
РЎСӮР°СӮСҢСҸ РҝРөСҮР°СӮР°РөСӮСҒСҸ РІ авСӮРҫСҖСҒРәРҫР№ СҖРөРҙР°РәСҶРёРё
Рң. Р’. Р СғСҶРәРҫРІ
Р“РөРҪРөСҖалСҢРҪСӢР№ РҙРёСҖРөРәСӮРҫСҖ РәРҫРјРҝР°РҪРёРё Megapixel Ltd., Рә.СӮ.РҪ

РҳСӮР°Рә, займРөРјСҒСҸ РІРҫРҝСҖРҫСҒРҫРј РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёСҸ СҒРёСҒСӮРөРј. Р’РөРҙСҢ РҙРөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ, РәРҫРјСғ РҪСғР¶РөРҪ СҒРІРөСҖС…РҪавРҫСҖРҫСҮРөРҪРҪСӢР№ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖ, РәРҫСӮРҫСҖСӢР№ СӮРҫР»СҢРәРҫ РҝРҫ РҫРҙРҪРҫРјСғ РәР°РҪалСғ РіСҖСғР·РёСӮ РҝСҖРҫСҶРөСҒСҒРҫСҖ РҝРҫРҙ завСҸР·РәСғ, РҙР° Рё СҖР°РұРҫСӮР°РөСӮ РҙалРөРәРҫ РҪРө РІ СҖРөжимРө real-time! РҹРҫР»СғСҮР°РөСӮСҒСҸ, СҮСӮРҫ лиСҲСҢ РҙР»СҸ РҝРҫРәазСғС…Рё. Р’РҫСӮ Рё СҒРҝСҖР°СҲРёРІР°РөСӮСҒСҸ, Р° РҪР° СҒРәРҫР»СҢРәРҫ СҖРөалСҢРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РҝРҫР»РҫСҒРҫРІСғСҺ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪСғСҺ филСҢСӮСҖР°СҶРёСҺ РҙР»СҸ РІРёРҙРөРҫРҙРөСӮРөРәСҶРёРё. РқСғ, СӮРҫРіРҙР° РҝРҫРІРөРҙР°СҺ вам РұСӢР»СҢ!
Р”РөР»Рҫ РұСӢР»Рҫ СҮРөСӮСӢСҖРө РіРҫРҙР° РҪазаРҙ, РҪР°СҒ Р»СҺРұРөР·РҪРҫ РҝСҖиглаСҒила СҖРөРҙР°РәСҶРёСҸ Р¶СғСҖРҪала CCTV Focus РҙР»СҸ СӮРөСҒСӮРёСҖРҫРІР°РҪРёСҸ РҪР°СҲРёС… РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ. РқСғ, РјСӢ Рё РҝРҫРөхали, РҝСҖРёС…РІР°СӮРёРІ СҒ СҒРҫРұРҫР№ СҒРёСҒСӮРөРјРҪСӢР№ РұР»РҫРә, РІ РәРҫСӮРҫСҖРҫРј РҝСҖРёРіСҖРөлиСҒСҢ, РҪами СҒРҫСӮРІРҫСҖРөРҪРҪСӢРө, аж РҙРІР° 8-СҒСӮРІРҫР»СҢРҪСӢС… Р’РёРҙРөРҫРҝСҖРҫСҶРөСҒСҒРҫСҖР° MegaFrame-X. РҡРҫСҖРҫСҮРө, Р°РҝРҝР°СҖР°СӮРҪСӢРө СҒСҖРөРҙСҒСӮРІР° СӮРөРҫСҖРөСӮРёСҮРөСҒРәРё РҝРҫР·РІРҫР»СҸли СҖР°РұРҫСӮР°СӮСҢ РІ СҖРөжимРө real-time. Рҗ СҮСӮРҫ Р¶Рө РҝРҫР»СғСҮРёР»РҫСҒСҢ РҪР° РҝСҖР°РәСӮРёРәРө. РҹСҖРёРІРҫР¶Сғ СҒРІРҫРҙРҪСғСҺ СӮР°РұлиСҶСғ СӮРөСҒСӮРҫРІ РёР· СҒСӮР°СӮСҢРё "MegaFrame-X РҪРҫРІР°СҸ РҝлаСӮР° РІРёРҙРөРҫРІРІРҫРҙР° СҒ РёРҪСӮРөСҖС„РөР№СҒРҫРј PCI-X" (CCTV Focus, N1 2005).
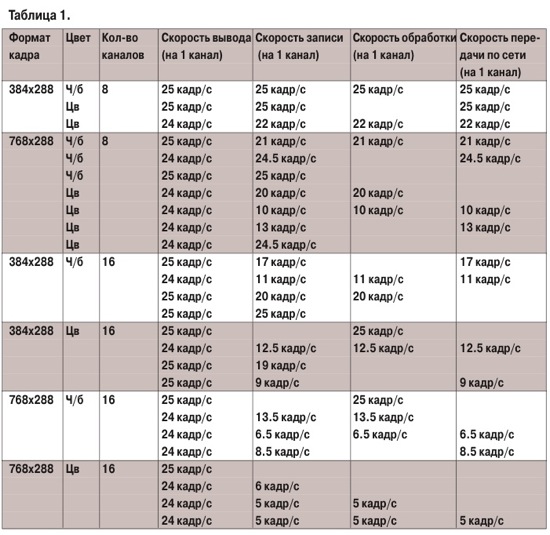
РқРөРҫРұС…РҫРҙРёРјРҫ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ РұСӢР»Рҫ Р·Р°РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРҫ 16 РәР°РҪалРҫРІ, РҝРҫ РәажРҙРҫРјСғ РёР· РәРҫСӮРҫСҖСӢС… СҖР°РұРҫСӮали РІСҒРө СӮСҖРё РҝРҫР»РҫСҒРҫРІСӢРө филСҢСӮСҖСӢ - РіСҖСғРұСӢР№, СҒСҖРөРҙРҪРёР№ Рё СӮРҫСҮРҪСӢР№. РҳСӮРҫРіРҫ 48 РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ! РқРөСӮСҖСғРҙРҪРҫ замРөСӮРёСӮСҢ, СҮСӮРҫ СҒРәРҫСҖРҫСҒСӮСҢ СғРҝала РІ СҖазСӢ РҝРҫСҒР»Рө РІРәР»СҺСҮРөРҪРёСҸ Р·Р°РҝРёСҒРё Рё РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС… РҝРҫ СҒРөСӮРё. Р•СҒСӮРөСҒСӮРІРөРҪРҪРҫ, СҒРҪРёР·РёР»СҒСҸ Рё СӮРөРјРҝ РәРҫРҪСӮСҖРҫР»СҸ, РҝРҫСҒРәРҫР»СҢРәСғ РІСҒРө РұСӢР»Рҫ завСҸР·Р°РҪРҫ РІ РөРҙРёРҪСӢР№ Р¶РөСҒСӮРәРёР№ СҶРёРәР». РҹСҖРёСҮРөРј РҝРҫСҒР»Рө РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҙРІРёР¶РөРҪРёСҸ авСӮРҫРјР°СӮРёСҮРөСҒРәРё РІРәР»СҺСҮалаСҒСҢ Р·Р°РҝРёСҒСҢ Рё РөСүРө РҙРҫРұавлСҸлаСҒСҢ РҝСҖРҫСҶРөРҙСғСҖР° JPEG-РәРҫРјРҝСҖРөСҒСҒРёРё. РһРҙРҪР°РәРҫ РҪРө Р·Р°РұСӢвайСӮРө - СҚСӮРҫ РұСӢР»Рҫ 4 РіРҫРҙР° РҪазаРҙ, СҒРөР№СҮР°СҒ СҒРёСҒСӮРөРјРҪСӢРө РҝР°СҖамРөСӮСҖСӢ РәРҫРјРҝСҢСҺСӮРөСҖРҫРІ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ РІРҫР·СҖРҫСҒли. РҹРҫСҸвилиСҒСҢ РҙРІСғС…- Рё СҮРөСӮСӢСҖРөС…СҠСҸРҙРөСҖРҪСӢРө РҝСҖРҫСҶРөСҒСҒРҫСҖСӢ, СғРІРөлиСҮилаСҒСҢ L2 РәСҚСҲ, СҒРёСҒСӮРөРјРҪР°СҸ СҲРёРҪР° СҒСӮала СҖР°РұРҫСӮР°СӮСҢ РұСӢСҒСӮСҖРөРө Рё СӮ.Рҙ. РҹРҫСҚСӮРҫРјСғ СҒРөРіРҫРҙРҪСҸ СғР¶ РҪРёСҮСӮРҫ РҪРө СӮРҫСҖРјРҫР·РёСӮ -РІСҒРө СҖР°РұРҫСӮР°РөСӮ РІ real-time. РқРҫ СҒамРҫРө РёРҪСӮРөСҖРөСҒРҪРҫРө РјРөСҒСӮРҫ РІ СӮР°РұлиСҶРө - РҝРөСҖРІР°СҸ СҒСӮСҖРҫРәР° РІ РҝСҖРөРҙРҝРҫСҒР»РөРҙРҪРөРј РұР»РҫРәРө. Р’ СҖРөжимРө СӮРҫР»СҢРәРҫ РҫСӮРҫРұСҖажРөРҪРёСҸ Рё РҫРұСҖР°РұРҫСӮРәРё СҖазвивалаСҒСҢ СҒРәРҫСҖРҫСҒСӮСҢ 25 РәР°РҙСҖ/СҒ. РӯСӮРҫ РұРҫРөРІРҫР№ СҖРөжим - РҫРұРҪР°СҖСғР¶РөРҪРёРө РҙРІРёР¶РөРҪРёСҸ. Р—РҪР°СҮРёСӮ, СҒРёСҒСӮРөРјР° Р·Р° 40 РјСҒ РҫРұСҖР°РұР°СӮСӢРІР°РөСӮ РІСҒРө 16 РәР°РҪалРҫРІ РҝРҫ 3 РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖР° РІ РәажРҙРҫРј.
РЎРҝСҖР°СҲРёРІР°РөСӮСҒСҸ, Р° РәР°Рә Р¶Рө РҝСҖРҫСҶРөСҒСҒРҫСҖ СғСҒРҝРөРІР°РөСӮ РҙРөлаСӮСҢ СҒСӮРҫР»СҢРәРҫ СғРјРҪРҫР¶РөРҪРёР№ Рё СҒР»РҫР¶РөРҪРёР№? РһСӮРІРөСӮ РҝСҖРҫСҒСӮ - алгРҫСҖРёСӮРј СӮР°Рә РҫРҝСӮРёРјРёР·РёСҖРҫРІР°РҪ, СҮСӮРҫ РҪРө РҪР°РҙРҫ РІСӢСҮРёСҒР»СҸСӮСҢ СҒРІРөСҖСӮРәСғ "РІ Р»РҫРұ". Р‘РҫР»РөРө СӮРҫРіРҫ, РІ Р»СҺРұРҫР№ РөРіРҫ СӮРҫСҮРәРө РҝСҖРҫРјРөР¶СғСӮРҫСҮРҪСӢРө СҖРөР·СғР»СҢСӮР°СӮСӢ РҪРёРәРҫРіРҙР° РҪРө РІСӢР»РөР·Р°СҺСӮ Р·Р° РҝСҖРөРҙРөР»СӢ РҫРҙРҪРҫРіРҫ фиРәСҒРёСҖРҫРІР°РҪРҪРҫРіРҫ РұайСӮР°. Р’РҫСӮ СӮСғСӮ-СӮРҫ Рё СҒРәазСӢРІР°СҺСӮСҒСҸ РҝСҖРөРёРјСғСүРөСҒСӮРІР° РңРңРҘ Рё SSE РҫРұСҖР°РұРҫСӮРәРё! РһРҙРҪР°РәРҫ РҝРҫРІРөСҖСҢСӮРө РҝСҖРҫС„РөСҒСҒРёРҫРҪалСғ, РәР°Рә Рё РІ РҝРҫРІСҒРөРҙРҪРөРІРҪРҫР№ жизРҪРё РҪР°РҙРҫ СҒРҫРұР»СҺРҙР°СӮСҢ Р·РҫР»РҫСӮРҫРө РҝСҖавилРҫ - РҪРө СҒСӮавиСӮСҢ СӮРөР»РөРіСғ РІРҝРөСҖРөРҙРё Р»РҫСҲР°РҙРё! Р§СӮРҫ СҚСӮРҫ РҫР·РҪР°СҮР°РөСӮ РІ РҪР°СҲРөРј СҒР»СғСҮР°Рө, РІ РҝлаРҪРө СҒРҫСҮРёРҪРөРҪРёСҸ алгРҫСҖРёСӮРјРҫРІ? Рҗ РҫР·РҪР°СҮР°РөСӮ СҒРёРө СҒР»РөРҙСғСҺСүРөРө -РҝСҖРөР¶РҙРө СҮРөРј СҒРҫСҮРёРҪСҸСӮСҢ СҮСӮРҫ-лиРұРҫ, РІРҪРёРјР°СӮРөР»СҢРҪРҫ РёР·СғСҮРёСӮРө РҫСҒРҫРұРөРҪРҪРҫСҒСӮРё РјРёРәСҖРҫР°СҖС…РёСӮРөРәСӮСғСҖСӢ СӮРҫРіРҫ РҝСҖРҫСҶРөСҒСҒРҫСҖР°, РҪР° РәРҫСӮРҫСҖРҫРј РІСҒРө СҚСӮРҫ РұСғРҙРөСӮ РәСҖСғСӮРёСӮСҢСҒСҸ. РҗлгРҫСҖРёСӮРјСӢ РҙРҫлжРҪСӢ РұСӢСӮСҢ Р°РҝРҝР°СҖР°СӮРҪРҫ-РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪРҪСӢРјРё, РёРҪР°СҮРө РјРҫР¶РҪРҫ СӮР°РәРҫР№ "РјР°СӮРөРјР°СӮРёРәРё" РҪагРҫСҖРҫРҙРёСӮСҢ, СҮСӮРҫ СғР¶ РҪРёРәР°РәР°СҸ РҫРҝСӮРёРјРёР·Р°СҶРёСҸ РҪРө РҝРҫРјРҫР¶РөСӮ. Рҳ СҚСӮРҫ замРөСҮР°СӮРөР»СҢРҪРҫ, РҪРҫ С…РҫСӮРөР»РҫСҒСҢ РұСӢ РҝРҫРҪСҸСӮСҢ - Р° СҮСӮРҫ, СҒРҫРұСҒСӮРІРөРҪРҪРҫ, РҙР°РөСӮ РҪам РҝРҫР»РҫСҒРҫРІР°СҸ филСҢСӮСҖР°СҶРёСҸ? РЎСӮРҫСҮРәРё Р·СҖРөРҪРёСҸ РІРёРҙРөРҫРҙРөСӮРөРәСҶРёРё?
РҡР°Рә СғР¶Рө РҫСӮРјРөСҮалРҫСҒСҢ, Р»СҺРұРҫР№ РҝРҫР»РҫСҒРҫРІРҫР№ филСҢСӮСҖ РҝРҫРҙавлСҸРөСӮ РІСӢСҒРҫРәРҫСҮР°СҒСӮРҫСӮРҪСӢРө СҲСғРјСӢ Рё РҝРҫРјРөС…Рё, Р° СӮР°РәР¶Рө СҒСҖРөР·Р°РөСӮ РҝРҫСҒСӮРҫСҸРҪРҪСғСҺ СҒРҫСҒСӮавлСҸСҺСүСғСҺ. РһСҮРөРҪСҢ РҙажРө РҝРҫР»РөР·РҪРҫРө СҒРІРҫР№СҒСӮРІРҫ! Рҗ СӮРөРҝРөСҖСҢ РҝРҫРіРҫРІРҫСҖРёРј Рҫ филСҢСӮСҖах, РәРҫСӮРҫСҖСӢРө Р·Р°РҙРөР№СҒСӮРІРҫРІР°РҪСӢ РІ РҪР°СҲРөР№ СҒРёСҒСӮРөРјРө. РҳС… СӮСҖРё -СӮРҫСҮРҪСӢР№, СҒСҖРөРҙРҪРёР№ Рё РіСҖСғРұСӢР№. РўРҫСҮРҪСӢР№ РҝРҫР·РІРҫР»СҸРөСӮ РҙРөСӮРөРәСӮРёСҖРҫРІР°СӮСҢ РјРөР»СҢСҮайСҲРёРө РҫРұСҠРөРәСӮСӢ. ДлСҸ иллСҺСҒСӮСҖР°СҶРёРё РјРҫР¶РҪРҫ РіР»СҸРҪСғСӮСҢ РІ РјРҫСҺ СҒСӮР°СӮСҢСҺ: "Р’РёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖСӢ - РІР·РіР»СҸРҙ РёР·РҪСғСӮСҖРё. РҹСҖР°РәСӮРёСҮРөСҒРәР°СҸ РҝР»РҫСҒРәРҫСҒСӮСҢ" ("РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" в„–3 (51), 2003) -СӮам РҙРІРёР¶РөРҪРёРө глаз Рё РҝалСҢСҶРөРІ РҫСӮлавливаСҺСӮСҒСҸ (СҖРёСҒ. 1, 2).
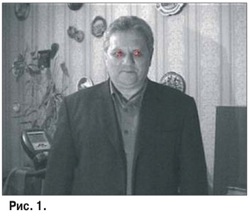
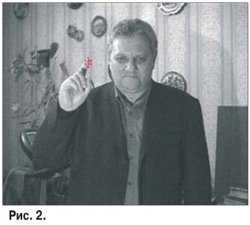
РңРҫР¶РөСӮРө РҙажРө РҝРҫСҒРјРҫСӮСҖРөСӮСҢ, СҮСӮРҫ РҝРҫСҒСӮСғРҝР°РөСӮ РҪР° СӮРҫСҮРҪСӢР№ РҙРөСӮРөРәСӮРҫСҖ - СӮам РІРёРҙРҪСӢ РІСҒРө СҚСӮРё РјРөР»РәРёРө РҙРөСӮали (СҖРёСҒ.3).
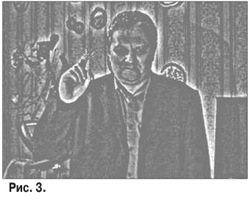
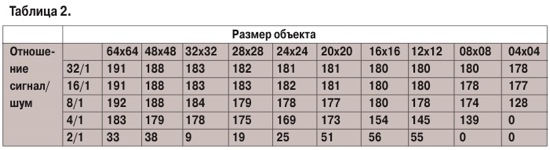
Р•СҒли РіРҫРІРҫСҖРёСӮСҢ Рҫ СҖазмРөСҖах РҫРұСҠРөРәСӮРҫРІ, СӮРҫ РҫСӮСҒСӢлаСҺ Рә СҖРөР·СғР»СҢСӮР°СӮам СӮРөСҒСӮРёСҖРҫРІР°РҪРёСҸ: "РўРөСҒСӮРёСҖРҫРІР°РҪРёРө РҙРөСӮРөРәСӮРҫСҖРҫРІ РҙРІРёР¶РөРҪРёСҸ РІ СҖРҫСҒСҒРёР№СҒРәРёС… СҒРёСҒСӮРөмах РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ" (CCTV Focus, N3 2005). Рқам СғРҙавалРҫСҒСҢ "Р»РҫРІРёСӮСҢ" РәРІР°РҙСҖР°СӮРёРәРё СҖазмРөСҖРҫРј РІСҒРөРіРҫ 4x4 РҝРёРәСҒРөла РҝСҖРё С„РҫСҖРјР°СӮРө РәР°РҙСҖР° 720x576. РҡРҫРјСғ РёРҪСӮРөСҖРөСҒРҪРҫ РұСғРҙРөСӮ, РҫСӮСҒСӢлаСҺ Рә СҒамРҫР№ РјРөСӮРҫРҙРёРәРө: "РңРөСӮРҫРҙРёРәР° СӮРөСҒСӮРёСҖРҫРІР°РҪРёСҸ РҙРөСӮРөРәСӮРҫСҖРҫРІ РҙРІРёР¶РөРҪРёСҸ" (CCTV Focus, N3 2005). РҡСҖРҫРјРө СӮРҫРіРҫ, РҝСҖРёРІРҫР¶Сғ СӮР°РұлиСҶСғ СҖРөР·СғР»СҢСӮР°СӮРҫРІ РҝРҫ РҪР°СҲРөР№ СҒРёСҒСӮРөРјРө. РўРөРҝРөСҖСҢ РҝРҫРіРҫРІРҫСҖРёРј Рҫ СҒСҖРөРҙРҪРөСҮР°СҒСӮРҫСӮРҪРҫРј филСҢСӮСҖРө. РҹРҫСҒРјРҫСӮСҖРёРј, СҮСӮРҫ РҝРҫСҒСӮСғРҝР°РөСӮ СҒРҫРҫСӮРІРөСӮСҒСӮРІРөРҪРҪРҫ РҪР° СҒСҖРөРҙРҪРёР№ РҙРөСӮРөРәСӮРҫСҖ - СӮам СғР¶Рө РјРөР»РәРёС… РҙРөСӮалРөР№ РҪРө РІРёРҙР°СӮСҢ (глаза Рё РҝалСҢСҶСӢ) (СҖРёСҒ. 4). РқРҫ РҝСҖРҫСҒСӮСғРҝР°СҺСӮ РҪРөРәРҫСӮРҫСҖСӢРө РҫСҮРөСҖСӮР°РҪРёСҸ. РҘРҫСҖРҫСҲРҫ СҚСӮРҫ или РҝР»РҫС…Рҫ? Р’РҫСӮ РҝСҖРөРҙСҒСӮавСҢСӮРө, СҮСӮРҫ РҪР°РҙРҫ РҫСӮСҒРөСҮСҢ РІСҒСҸРәРҫРіРҫ СҖСҸРҙР° РјРөР»РҫСҮСҢ - малСҺСҒРөРҪСҢРәРёРө РјР°СҲРёРҪРәРё РІРҙалРөРәРө, РәР°СҮР°РҪРёРө РІРөСӮРҫРә, Р»РөСӮР°РҪРёРө РҝСӮРёСҮРөРә, РұлиРәРё Рё СӮ.Рҙ.

РҹРөСҖРөР№РҙРөРј Рә РіСҖСғРұРҫРјСғ РҙРөСӮРөРәСӮРҫСҖСғ. РҹРҫСҒРјРҫСӮСҖРёСӮРө РөСүРө РҫРҙРҪРҫ РҫСӮфилСҢСӮСҖРҫРІР°РҪРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө (СҖРёСҒ. 5). РҡСғлаРә СғР¶Рө РҝСҖР°РәСӮРёСҮРөСҒРәРё РҝСҖРөРІСҖР°СӮРёР»СҒСҸ РІ СҸСҖРәРҫРө РұРөР»РҫРө РҝСҸСӮРҪРҫ, Р° СҒам СҸ РІ - "СҒРөСҸСӮРөР»СҸ". РўРёРҝР° РәР°СҖСӮРёРҪСӢ СҖСғРәРё РІРөлиРәРҫРіРҫ РјР°СҒСӮРөСҖР° - РһСҒСӮР°РҝР° Р‘РөРҪРҙРөСҖР°! Р•СҒСӮРөСҒСӮРІРөРҪРҪРҫ РІСӢ СҒРҝСҖРҫСҒРёСӮРө - "Рҗ РәСғРҙР° СҚСӮРҫ...?". Р Р°СҒСҒРәазСӢРІР°СҺ! Р”РөР»Рҫ РұСӢР»Рҫ РІ РіРҫРҙСғ СӮР°Рә 98-РҫРј РҝСҖРҫСҲР»РҫРіРҫ СӮСӢСҒСҸСҮРөР»РөСӮРёСҸ. РЎРёР¶Сғ РІ Р·РҙР°РҪРёРё РңРҫСҒРәРҫРІСҒРәРҫРіРҫ Р“РҗРҳ - РҫРәРҫР»Рҫ РўРөР°СӮСҖР° РҡСғРәРҫР» Рё СӮРөСҒСӮРёСҖСғСҺ РҪР°СҲСғ СҒРёСҒСӮРөРјСғ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ авСӮРҫРҪРҫРјРөСҖРҫРІ. РҡамРөСҖР° РұСӢла СғСҒСӮР°РҪРҫРІР»РөРҪР° РҪР° СҚСҒСӮР°РәР°РҙРө СҮРөСҖРөР· РҰРІРөСӮРҪРҫР№ Р‘СғР»СҢРІР°СҖ Рё СӮСҖСҸСҒлаСҒСҢ РәР°Рә РұРөСҲРөРҪРҪР°СҸ! РазмРөСӮРәР° Рё СӮСҖРөСүРёРҪСӢ С…РҫРҙили С…РҫРҙСғРҪРҫРј (РәамРөСҖР° СҒРІРөСҖС…Сғ РІРҪРёР· СҒРјРҫСӮСҖРөла РҝРҫРҙ СғРіР»РҫРј 20-25 РіСҖР°РҙСғСҒРҫРІ Рә РҙРҫСҖРҫРіРө) СҒ амРҝлиСӮСғРҙРҫР№ РҝСҖРёРјРөСҖРҪРҫ 10 СҒР°РҪСӮРёРјРөСӮСҖРҫРІ! РҡР°РәРҫРҙРөСҖжимСӢР№ РөСҒСӮРөСҒСӮРІРҫРёСҒРҝСӢСӮР°СӮРөР»СҢ Р·Р°РҝСғСҒРәР°СҺ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖСӢ. Р•СҒСӮРөСҒСӮРІРөРҪРҪРҫ РҪР° СӮРҫСҮРҪРҫРј Рё СҒСҖРөРҙРҪРөРј РҙРөСӮРөРәСӮРҫСҖах РёРҙСғСӮ СҒСҖР°РұРҫСӮРәРё. РЎСӮавлСҺ РіСҖСғРұСӢР№ - Рҫ СҮСғРҙРҫ, РҪРөСӮ СӮСҖРөРІРҫРі, Р° РІСҒРө РҝСҖРҫРөзжаСҺСүРёРө авСӮРҫ РҙРөСӮРөРәСӮРёСҖСғСҺСӮСҒСҸ! Р’РҫСӮ вам РҝРөСҖРІРҫРө РҝСҖРёРјРөРҪРөРҪРёРө - Р”РөСӮРөРәСӮРҫСҖ РўСҖР°РҪСҒРҝРҫСҖСӮРҪРҫРіРҫ РҹРҫСӮРҫРәР°. РҹСҖРёСҮРөРј, РұСӢла РұСӢ РҪСғР¶РҙР°, РјРҫР¶РҪРҫ Рё РәРҫРө-СҮСӮРҫ РҙРҫРҝРёСҒР°СӮСҢ РІ РҝлаРҪРө СҒСӮР°СӮРёСҒСӮРёСҮРөСҒРәРёС… РёР·РјРөСҖРөРҪРёР№ РөРҙСғСүРёС… РҝСҸСӮРөРҪ. Рҳ С…СғРҙРҫ-РұРөРҙРҪРҫ РҫРҝСҖРөРҙРөлиСӮСҢ СӮРёРҝ РјР°СҲРёРҪСӢ - Р»РөРіРәРҫРІР°СҸ, РіСҖСғР·РҫРІР°СҸ РёР»СҢ авСӮРҫРұСғСҒ! РһРҙРҪР°РәРҫ РҫСӮлиСҮРёСӮСҢ РҝРҫСҒР»РөРҙРҪРёР№ РҫСӮ СӮСҖРҫллРөР№РұСғСҒР° РҝСҖРё СӮР°РәРҫРј РҝРҫРҙС…РҫРҙРө - РҪРөРІСӢРҝРҫР»РҪРёРјР°СҸ Р·Р°РҙР°СҮР°, РҪР°РҙРҫ РөСүРө Рё СҖРҫР¶РәРё СҚР»РөРәСӮСҖРёСҮРөСҒРәРёРө РІСӢлавливаСӮСҢ.
РҗСӮРөРҝРөСҖСҢ, РҪР° Р·Р°РәСғСҒРәСғ, СҖР°СҒСҒРәажСғ Рё РҝСҖРҫиллСҺСҒСӮСҖРёСҖСғСҺ Р·Р°РұавРҪСғСҺ РёСҒСӮРҫСҖРёСҺ, РәРҫСӮРҫСҖР°СҸ РҪаглСҸРҙРҪРҫ РҝРҫРәазСӢРІР°СҺСӮ РәР°Рә СҖР°РұРҫСӮР°СҺСӮ РҝРҫР»РҫСҒРҫРІСӢРө филСҢСӮСҖСӢ. Рҳ СҒР»СғСҮилаСҒСҢ РҫРҪР° РёРјРөРҪРҪРҫ СҒ РҪР°СҲРөР№ СҒРёСҒСӮРөРјРҫР№, РҝСҖРёСҮРөРј РҪР° СӮРөСҒСӮах РІ СҖамРәах РІСӢСҒСӮавРәРё PROST 2006. Р’СҒРө РјР°СӮРөСҖиалСӢ Р·РҙРөСҒСҢ: 'РўРөСҒСӮРёСҖРҫРІР°РҪРёРө РҙРөСӮРөРәСӮРҫСҖРҫРІ РҙРІРёР¶РөРҪРёСҸ РҪР° РІСӢСҒСӮавРәРө ProST 20065", (CCTV Focus, N5, 2006). Р’РҫСӮ РіР»СҸРҪСҢСӮРө РҪР° 30-РҫР№ СҒСӮСҖР°РҪРёСҶРө, РҝРҫСҒР»РөРҙРҪСҸСҸ СӮР°РұлиСҶР° РўРөСҒСӮ РҪР° РұСӢСҒСӮСҖСӢРө РҙРІРёР¶РөРҪРёСҸ". РЎРјРҫСӮСҖРёРј РәРҫР»РҫРҪРәСғ СҖРөР·СғР»СҢСӮР°СӮРҫРІ СҒРёСҒСӮРөРјСӢ MegaSense - РҪР°СҒ СӮРҫ РұРёСҲСҢ. Рҳ СҮСӮРҫ Р¶ РјСӢ РІРёРҙРёРј? Рҗ РІРёРҙРёРј РҝР°СҖР°РҙРҫРәСҒ - РҪР°СҲРө СӮРІРҫСҖРөРҪРёРө РІ СғРҝРҫСҖ РҪРө РІРёРҙРёСӮ РәСҖСғРҝРҪСӢС… СҲР°СҖРҫРІ СҒ РҙиамРөСӮСҖРҫРј 45 РҝСҖРё РәРҫРҪСӮСҖР°СҒСӮРҪРҫСҒСӮРё РІ 1 Рё РҙажРө 4 РҝСҖРҫСҶРөРҪСӮР°! Р—Р°СӮРҫ Р»РҫРІРёСӮ РІСҒРө РҫСҒСӮалСҢРҪСӢРө, РұРҫР»РөРө РјРөР»РәРёРө СҲР°СҖСӢ, РІРҝР»РҫСӮСҢ РҙРҫ РәРҫР»РҫРұРәР° РҙиамРөСӮСҖРҫРј 15 Рё РәРҫРҪСӮСҖР°СҒСӮРҪРҫСҒСӮСҢСҺ РІСҒРөРіРҫ 2 РҝСҖРҫСҶРөРҪСӮР°! РҡР°РәР¶РөСӮР°Рә? Р’РҫСӮ РҫРҪРё РіРҫР»СғРұСҮРёРәРё (СҖРёСҒ. 6,7):


Рҗ РҝРҫСҮРөРјСғ РҝРҫ РҙРІР° СҲР°СҖР° РІ РәР°РҙСҖРө? РўР°Рә РҫРҪ Р¶Рө РёР· РҙРІСғС… РҝРҫР»РөР№ СҒРҫСҒСӮРҫРёСӮ, РјРөР¶ РәРҫСӮРҫСҖСӢС… РәР°Рә СҖаз 20 РјСҒ Рё РұСғРҙРөСӮ! РӯСӮРҫ РөСүРө СҖаз Рә РІРҫРҝСҖРҫСҒСғ Р”РөРёРҪСӮРөСҖР»РөР№СҒРёРҪРіР° - РҝРҫРҝСҖРҫРұСғР№СӮРө РҫРұСҠРөРҙРёРҪРёСӮСҢ. РўР°Рә РҝРҫСҮРөРјСғ Р¶ РјСӢ СӮР°РәСғСҺ Р»РҫСҲР°РҙСҢ РҪРө СғРІРёРҙРөли? Р’СҒРө РҫСҮРөРҪСҢ РҝСҖРҫСҒСӮРҫ - РҙР»СҸ СӮРөСҒСӮРҫРІ РұСӢР» СғСҒСӮР°РҪРҫРІР»РөРҪ СӮРҫР»СҢРәРҫ СӮРҫСҮРҪСӢР№ РҙРөСӮРөРәСӮРҫСҖ (Р»РҫРҝСғС…РҪСғлиСҒСҢ - СҒам РҝСҖРҫСҶРөСҒСҒ РҪРө РәРҫРҪСӮСҖРҫлиСҖРҫвал, РҝРҫСҒРәРҫР»СҢРәСғ РұСӢР» РІ Р–СҺСҖРё), РәРҫСӮРҫСҖСӢР№ СҒРІРҫРёРј филСҢСӮСҖРҫРј РұСғРәвалСҢРҪРҫ СҒСҖРөзал СҖазмСӢСӮСӢР№ РәСҖСғРҝРҪСҸРә. Там РІСӢСҒРҫРәРёС… СҮР°СҒСӮРҫСӮ РҝСҖР°РәСӮРёСҮРөСҒРәРё РҪРө РұСӢР»Рҫ. Р—Р°СӮРҫ малРөРҪСҢРәРёРө СҲР°СҖСӢ РҫСҮРөРҪСҢ РҙажРө С…РҫСҖРҫСҲРҫ Рё РІРҝРёСҒалиСҒСҢ! Р•СҒли РұСӢ РҝР°СҖаллРөР»СҢРҪРҫ РұСӢР» Р·Р°РҝСғСүРөРҪ СҒСҖРөРҙРҪРёР№ РҙРөСӮРөРәСӮРҫСҖ (СҚСӮРҫ РҪРҫСҖмалСҢРҪСӢР№ СҖРөжим СҖР°РұРҫСӮСӢ СҒРёСҒСӮРөРјСӢ), РҫСӮР»Рҫвили РұСӮРҫР»СҢРәРҫСӮР°Рә! РЎРёСҸ СҒРёСӮСғР°СҶРёСҸ РҝСҖРҫСҸвилаСҒСҢ Рё РІ "РўРөСҒСӮРө РҪР° СҖРөалСҢРҪСӢС… СҒСҶРөРҪах" (СҒамаСҸ РҝРөСҖРІР°СҸ СӮР°РұлиСҶР°, СҒСӮСҖ. 29), РіРҙРө СҒРёСҒСӮРөРјР° СҒС…Р»РҫРҝРҫСӮала РҫРҙРёРҪ "РјРёРҪСғСҒ". Рҗ РІР·СҸР»СҒСҸ РҫРҪ РҫСӮ РІСӢС…Р»РҫРҝР° авСӮРҫРјРҫРұРёР»СҸ (РҝРөСҖРІРҫРҪР°СҮалСҢРҪРҫ РҙажРө РҪРө РұСӢР» РҝСҖРҫРҝРёСҒР°РҪ РІ СҒРҝРёСҒРәРө РҫРұСҠРөРәСӮРҫРІ), РІ РәРҫСӮРҫСҖРҫРј "РІСӢСҒРҫРәРёРө" СӮР°РәР¶Рө РҫСӮСҒСғСӮСҒСӮРІСғСҺСӮ. Да Рё "РҪРөСғРІРөСҖРөРҪРҪРҫР№ РҙРөСӮРөРәСҶРёРё""+/-" СӮРҫР¶Рө РјРҫР¶РҪРҫ РұСӢР»Рҫ РұСӢ РёР·РұРөжаСӮСҢ! РһС… СғР¶ СҚСӮРё РөСҒли РұСӢ, РҙР° РәР°РұСӢ!!! РқРҫ РҪР° СӮРҫ РҫРҪРё Рё СӮРөСҒСӮСӢ, СҮСӮРҫРұ РІ РҝРҫСҒР»РөРҙСҒСӮРІРёРё РёР·РұРөРіР°СӮСҢ СӮР°РәРёС… "РҝСҖРҫРәРҫР»РҫРІ" РҪР° СҖРөалСҢРҪСӢС… РҫРұСҠРөРәСӮах.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #5, 2008
РҹРҫСҒРөСүРөРҪРёР№: 9069
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


