






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№

Рң.Р’. Р СғСҶРәРҫРІ
Р“РөРҪРөСҖалСҢРҪСӢР№ РҙРёСҖРөРәСӮРҫСҖ РәРҫРјРҝР°РҪРёРё MegaPixel Ltd., Рә.СӮ.РҪ.
Р’СӢ СғР¶ РјРөРҪСҸ РёР·РІРёРҪРёСӮРө, СӮРҫРІР°СҖРёСүРё РҙРҫСҖРҫРіРёРө, СҮСӮРҫ РІ РҝСҖРөРҙСӢРҙСғСүРёС… РҝСғРұлиРәР°СҶРёСҸС… СҒРәР°СӮРёР»СҒСҸ РҪР° РҙРІР° "Р’РёРҙРөРҫРҘлама". Рҗ СҮСӮРҫ РҙРөлаСӮСҢ? РқР°РҙРҫ Р¶ РәР°Рә-СӮРҫ РұРҫСҖРҫСӮСҢСҒСҸ СҒ РіР»СғРҝРҫСҒСӮСҸРјРё РІСҒСҸСҮРөСҒРәРёРјРё. Р’СҒРө - РҙРөР»Сғ РІСҖРөРјСҸ, РҝРҫСӮРөС…Рө СҮР°СҒ! РҹСҖРҫРҙРҫлжим. Р’ СӮСҖРөСӮСҢРөР№ СҮР°СҒСӮРё РұСӢла РҫРұРөСүР°РҪР° СҒСӮСҖСғРәСӮСғСҖРҪР°СҸ СҒС…РөРјР°, РәРҫСӮРҫСҖР°СҸ, РІ РҪРөРәРҫСӮРҫСҖРҫРј СҖРҫРҙРө, РҫлиСҶРөСӮРІРҫСҖСҸРөСӮ РёРҙРөРҫР»РҫРіРёСҮРөСҒРәРёР№ РҝРҫРҙС…РҫРҙ Рә РҝРҫСҒСӮСҖРҫРөРҪРёСҺ РёСҒСӮРёРҪРҪРҫ РҫС…СҖР°РҪРҪРҫРіРҫ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ, Р° РҪРө СӮСғРҝРҫРіРҫ Р°СҖС…РёРІРёСҖРҫРІР°РҪРёСҸ! РҹРҫР»СғСҮРёСӮРө!!! РӣРёСҲСҢ Р·Р° РҫРҙРҪРҫ РҝСҖРҫСҲСғ РҝСҖРҫСҒСӮРёСӮСҢ - СҚСӮР°РәСғСҺ С„СҖРёРІРҫР»СҢРҪРҫСҒСӮСҢ РІ РҝлаРҪРө СҖСғРәРҫСӮРІРҫСҖРҪСӢС… фаРҪСӮазий. РқСғ, РҪРөСӮ Сғ РјРөРҪСҸ РІСҖРөРјРөРҪРё РҪР° РҫСҒРІРҫРөРҪРёРө СҖазРҪРҫРҫРұСҖазРҪСӢС… СҖРёСҒРҫвалРҫРә. Рҗ СҮСӮРҫ, РјРҫР¶РөСӮ РұСӢСӮСҢ Рё СҒСӮРёР»СҢРҪРҫ РҝРҫР»СғСҮРёР»РҫСҒСҢ - РІ РҙСғС…Рө РІСҖРөРјРөРҪРё, СӮР°Рә СҒРәазаСӮСҢ! РҡажРҙСӢР№ Р»РөРҝРёСӮ РәР°Рә РјРҫР¶РөСӮ!
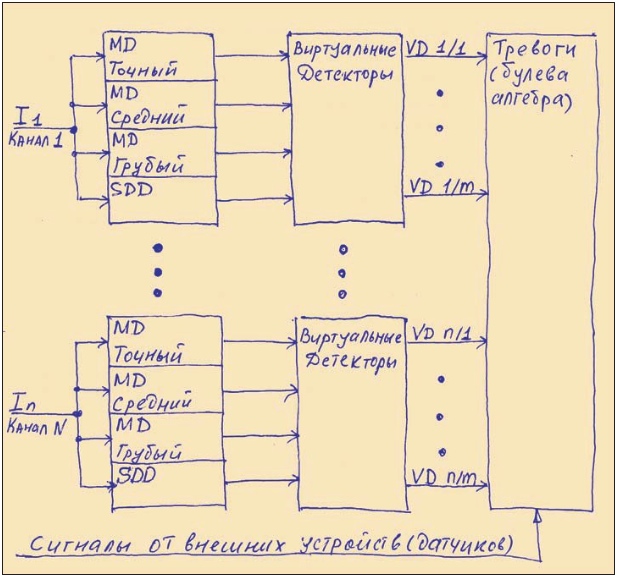
Р”СғРјР°СҺ, РІСҒРө РҝРҫРҪСҸСӮРҪРҫ. РҳР·РҫРұСҖажРөРҪРёСҸ РҫСӮ РәамРөСҖ РҝСҖРҫС…РҫРҙСҸСӮ СҮРөСҖРөР· РұазРҫРІСӢРө РҙРөСӮРөРәСӮРҫСҖСӢ вҖ” СӮСҖРё MD (СӮРҫСҮРҪСӢР№, СҒСҖРөРҙРҪРёР№, РіСҖСғРұСӢР№) Рё РҫРҙРёРҪ SDD. ДалРөРө СҒ РҝРҫРјРҫСүСҢСҺ РјР°СҒРҫРә Рё РёРҪРҙРёРІРёРҙСғалСҢРҪСӢС… РҪР°СҒСӮСҖРҫРөРә С„РҫСҖРјРёСҖСғСҺСӮСҒСҸ Р’РёСҖСӮСғалСҢРҪСӢРө Р”РөСӮРөРәСӮРҫСҖСӢ вҖ” VD (РҙРҫ 32-С… РҙР»СҸ РәажРҙРҫРіРҫ РәР°РҪала). РЎР»РөРҙСғРөСӮ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ СҖРөСҒСғСҖСҒСӢ СҒРёСҒСӮРөРјСӢ РҪРө СҖР°РұРҫСӮР°РөСӮ РІ С…РҫР»РҫСҒСӮСғСҺ вҖ” СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёР№ РҙРөСӮРөРәСӮРҫСҖ Р°РәСӮРёРІРёСҖСғРөСӮСҒСҸ СӮРҫР»СҢРәРҫ РІ СӮРҫРј СҒР»СғСҮР°Рө, РөСҒли РҫРҪ Р·Р°РҙР°РҪ С…РҫСӮСҸ РұСӢ РІ РҫРҙРҪРҫРј VD. Р’СҒРө СҚСӮРҫ С…РҫР·СҸР№СҒСӮРІРҫ "замРөСҲРёРІР°РөСӮСҒСҸ" СҒ РҝРҫРјРҫСүСҢСҺ РұСғР»РөРІРҫР№ алгРөРұСҖСӢ РІ СӮСҖРөРІРҫРіРё (РҙРҫ 128-РјРё). РЎРёРіРҪалСӢ РҫСӮ РІРҪРөСҲРҪРёС… СғСҒСӮСҖРҫР№СҒСӮРІ (РҙР°СӮСҮРёРәРҫРІ) СӮРҫР¶Рө СғСҮР°СҒСӮРІСғСҺСӮ.
РўР°РәРёРј РҫРұСҖазРҫРј, РёРјРөРөРј РҪРөРәРҫРө РҝРҫРҙРҫРұРёРө РҝРөСҖРІРёСҮРҪРҫР№ Р·СҖРёСӮРөР»СҢРҪРҫР№ СҒРёСҒСӮРөРјСӢ СҮРөР»РҫРІРөРәР°, РІ РәРҫСӮРҫСҖРҫР№ РҙРөР№СҒСӮРІСғРөСӮ РҪР°РұРҫСҖ РҝРҫР»РҫСҒРҫРІСӢС… филСҢСӮСҖРҫРІ РҪР° СҖазРҪСӢРө СҒР»СғСҮаи жизРҪРё. РўРҫСҮРҪСӢР№ филСҢСӮСҖ РҫСӮСҒР»РөживаРөСӮ РјРөР»РәРёРө РҙРөСӮали, РҝРҫРҙавлСҸСҸ РҪРёР·РәРҫСҮР°СҒСӮРҫСӮРҪСӢРө Рё СҒСҖРөРҙРҪРөСҮР°СҒСӮРҫСӮРҪСӢРө флСғРәСӮСғР°СҶРёРё - РёР·РјРөРҪРөРҪРёСҸ, СҒРІСҸР·Р°РҪРҪСӢРө, РҪР°РҝСҖРёРјРөСҖ, СҒ РҝРөСҖРөРәСҖСӢСӮРёРөРј Рё РҫСӮРәСҖСӢСӮРёРөРј СҒРҫР»РҪСҶР° РҫРұлаРәами. РЎСҖРөРҙРҪРёР№ филСҢСӮСҖ С…РҫСҖРҫСҲРҫ РҫСӮСҒРөРәР°РөСӮ РјРөР»РәРёРө РҫРұСҠРөРәСӮСӢ, СҒРәажРөРј РјР°СҲРёРҪСӢ, РәРҫСӮРҫСҖСӢРө РҝРҫРҝР°РҙР°СҺСӮ РІ РәР°РҙСҖ, РҪРҫ РҪахРҫРҙСҸСӮСҒСҸ РҪР° Р·Р°РҙРҪРөРј РҝлаРҪРө РІРҙалРөРәРө. РқСғ, Р° РіСҖСғРұСӢР№ филСҢСӮСҖ РҝСҖРҫСҒСӮРҫ "СғРұРёРІР°РөСӮ" РІСҒСҺ РјРөР»РҫСҮСҢ, РҙРөСӮРөРәСӮРёСҖСғСҸ СӮРҫР»СҢРәРҫ РәСҖСғРҝРҪСӢРө РҫРұСҠРөРәСӮСӢ. РҹСҖРёСҮРөРј СҒРҝСҖавлСҸРөСӮСҒСҸ РҙажРө СҒ РІРёРұСҖР°СҶРёРөР№ СҒамРҫР№ РәамРөСҖСӢ. Р РөализаСҶРёСҸ СӮСҖРөРІРҫРі РәР°Рә С„СғРҪРәСҶРёР№ РұСғР»РөРІРҫР№ алгРөРұСҖСӢ СӮРҫР¶Рө РёРјРөРөСӮ СҒРІРҫРё РҝСҖРөР»РөСҒСӮРё. РҹСҖРёРІРөРҙСғ лиСҲСҢ РҝР°СҖСғ РҝСҖРёРјРөСҖРҫРІ. РқР°РҝСҖРёРјРөСҖ, РјРҫР¶РҪРҫ Р·Р°РҝСҖРҫРіСҖаммиСҖРҫРІР°СӮСҢ "РҫРұСҠРөРјРҪРҫРө" РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёРө, РәРҫРіРҙР° РҪРөСҒРәРҫР»СҢРәРҫ РәамРөСҖ СҒРјРҫСӮСҖСҸСӮ РҪР° РҫРҙРёРҪ РҫРұСҠРөРәСӮ СҒ СҖазРҪСӢС… СӮРҫСҮРөРә, Р° СӮСҖРөРІРҫРіР° РІСӢСҖР°РұР°СӮСӢРІР°РөСӮСҒСҸ лиСҲСҢ РҝСҖРё РөРҙРёРҪРҫРІСҖРөРјРөРҪРҪРҫРј СҒСҖР°РұР°СӮСӢРІР°РҪРёРё РІСҒРөС… СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёС… РІРёСҖСӮСғалСҢРҪСӢС… РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ - Р»РҫРіРёСҮРөСҒРәР°СҸ С„СғРҪРәСҶРёСҸ "Рҳ". РҹРҫ СӮСҖРөРІРҫРіРө РјРҫР¶РҪРҫ Р·Р°РҙР°СӮСҢ Р»СҺРұРҫРө РҙРөР№СҒСӮРІРёРө: Р·Р°РҝРёСҒСҢ РІ Р°СҖС…РёРІ РёР·РҫРұСҖажРөРҪРёР№ РҫСӮ Р»СҺРұСӢС… РәамРөСҖ, Р·РІСғРәРҫРІРҫРө РҫРҝРҫРІРөСүРөРҪРёРө, РІСҒРҝР»СӢРІР°СҺСүРөРө РҫРәРҪРҫ, Р°РәСӮРёРІР°СҶРёСҸ РІРҪРөСҲРҪРөРіРҫ СғСҒСӮСҖРҫР№СҒСӮРІР° Рё СӮ.Рҙ.
Рҗ РІРҫСӮ РұРҫР»РөРө СҚРәР·РҫСӮРёСҮРөСҒРәРёР№ СҒРҝРҫСҒРҫРұ, РәРҫРіРҙР° РІСҒРө РІРёСҖСӮСғалСҢРҪСӢРө РҙРөСӮРөРәСӮРҫСҖСӢ СҖР°СҒРҝРҫР»РҫР¶РөРҪСӢ РІ РәР°РҙСҖРө РҫСӮ РҫРҙРҪРҫР№ РәамРөСҖСӢ. Р Р°СҒСҒРәазСӢРІР°СҺ РІ СҖРҫР»СҸС…:
РҹСҖРёРұРөРіР°РөСӮ РәРҫ РјРҪРө РјРҫР№ РҝР°СҖСӮРҪРөСҖ РёРјРҝРҫСҖСӮРҪСӢР№ Рё взахлРөРұ РҪР°СҮРёРҪР°РөСӮ РІРөСүР°СӮСҢ Рҫ СӮРҫРј, СҮСӮРҫ, РјРҫР», СҒРҫ СҒСӮСҖР°СҲРҪРҫР№ СҒРёР»РҫР№ РҪСғР¶РҪР° СӮРөС…РҪРҫР»РҫРіРёСҸ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РјРҫСӮРҫСҖРҫллРөСҖРҪСӢС… РҪРҫРјРөСҖРҫРІ! Р•СҒли РәСӮРҫ РҙСҖСғРіРҫР№ (РҪРөС…РҫСҖРҫСҲРёР№) РҪР° РјРҫРөРј РјРөСҒСӮРө РұСӢР», СӮРҫ СҒСҖазСғ РұСӢ СҒРҝСҖРҫСҒРёР» вҖ” "РЎРәРҫР»СҢРәРҫ?". РқРҫ РјСӢ РІРөРҙСҢ РіСғРјР°РҪРҫРёРҙСӢ, РҫСӮРҪСҺРҙСҢ! РҹРҫСҚСӮРҫРјСғ РјРҫР№ РІРҫРҝСҖРҫСҒ РҝСҖРҫР·РІСғСҮал РҪРөСҒРәРҫР»СҢРәРҫ РёРҪР°СҮРө вҖ” "Р—Р°СҮРөРј?" РўРҫРіРҙР° РҫРҪ СҖР°СҒСҒРәазал РјРҪРө РіСҖСғСҒСӮРҪСғСҺ РёСҒСӮРҫСҖРёСҺ, Рҫ СӮРҫРј, СҮСӮРҫ "С…СғлигаРҪСӢ-РҝРҫРҙСҖРҫСҒСӮРәРё" РҪР° РјРҫСӮРҫСҖРҫллРөСҖах РІСҠРөзжаСҺСӮ РІ РҝР°СҖРәРҫРІСӢРө Р·РҫРҪСӢ вҖ” РҪРө РҝСғСӮР°СӮСҢ СҒ РҝР°СҖРәРҫРІРәРҫР№! Рҗ СӮам РІСҖРҫРҙРө РјРҫРіСғСӮ СӮРҫР»СҢРәРҫ мамСӢ СҒ РҙРөСӮСҢРјРё РҝСҖРҫРіСғливаСӮСҢСҒСҸ. Да СғР¶ вҖ” РҝСҖРҫРұР»РөРјР°! РқСғ, СӮРҫРіРҙР° РіРҫРІРҫСҖСҺ: "РңРҫР»РҫРҙРөСҶ, Р·РҙРҫСҖРҫРІРҫ РҝСҖРёРҙСғмал, Р° РөСҒли РҫРҪРё РҝРөСҖРөРҙ РІСҠРөР·РҙРҫРј СӮСҖСҸРҝРҫСҮРәСғ РҪР° РҪРҫРјРөСҖ РҪР°РәРёРҪСғСӮ?". РһРҪ СӮР°Рә РёР·СғРјРёР»СҒСҸ: "Р”СғРјР°РөСҲСҢ вҖ” СҒРҫРҫРұСҖазСҸСӮ? " "Рҗ СӮРҫ! РҘРҫСӮСҸ РҪРө Р·РҪР°СҺ, РәР°Рә РІР°СҲРё РҙРөСӮРё, Р° РҪР°СҲРё вҖ” РІР»РөСӮ...!" РһСҮРөРҪСҢ РҫРҪ СҖР°СҒСҒСӮСҖРҫРёР»СҒСҸ Рё СҒРҝСҖР°СҲРёРІР°РөСӮ: "Р§СӮРҫ РҙРөлаСӮСҢ? " "РқРө РІРҫР»РҪСғР№СҒСҸ", вҖ” РіРҫРІРҫСҖСҺ, "РӯСӮРҫ РҪР°СҲ РёСҒСӮРёРҪРҪРҫ СҖСғСҒСҒРәРёР№ РІРҫРҝСҖРҫСҒ! Р’СҒРө РҫСҮРөРҪСҢ РҝСҖРҫСҒСӮРҫ вҖ” СҖРөСҲРөРҪРёРө СғР¶Рө залРҫР¶РөРҪРҫ. РЈСҒСӮР°РҪРҫРІРё РәамРөСҖСғ СҒРІРөСҖС…Сғ. Р•СҒли мамСӢ СҒ РҙРөСӮСҢРјРё РІ РҝР°СҖРә захРҫРҙСҸСӮ, СӮРҫ РҫРҪРё РәР°Рә РұСӢ РІ СҲРёСҖРёРҪСғ СҖР°СҒРҝРҫлагаСҺСӮСҒСҸ (Р·Р° СҖСғРәРё РҙРөСҖжаСӮСҒСҸ), Р° РјРҫСӮРҫСҖРҫллРөСҖ РІ РҙлиРҪСғ РІСӢСӮСҸРіРёРІР°РөСӮСҒСҸ.
Р’РҫР·СҢРјРё, С…РҫСӮСҸ РұСӢ СӮСҖРё Р·РҫРҪСӢ РҪР°СҖРёСҒСғР№ (РІ РҪР°СҲРөР№ СҒРёСҒСӮРөРјРө РјРҫР¶РҪРҫ Р·Р°РҙаваСӮСҢ РҝСҖРҫРёР·РІРҫР»СҢРҪСӢРө Р·РҫРҪСӢ РҙРөСӮРөРәСҶРёРё) РІСҒСӮСӢРә РҝРҫ РҪР°РҝСҖавлРөРҪРёСҺ РІСҠРөР·РҙР° Рё РјРөР¶ РҪРёРјРё С„СғРҪРәСҶРёСҺ "Рҳ" РҫСҖРіР°РҪРёР·СғР№, СӮРҫРіРҙР° СӮРҫР»СҢРәРҫ РҙлиРҪРҪРҫРјРөСҖРҪСӢРө РҫРұСҠРөРәСӮСӢ РҙРөСӮРөРәСӮРёСҖРҫРІР°СӮСҢСҒСҸ РұСғРҙСғСӮ. РқРөСӮ, РәРҫРҪРөСҮРҪРҫ, РөР¶Рөли РәСӮРҫ захРҫРҙ РұСғРҙРөСӮ РІ СӮР°РҪСҶРө РҙРөлаСӮСҢ вҖ” "РӣРөСӮРәСғ-Р•РҪРәСғ" РёСҒРҝРҫР»РҪСҸСҸ, СӮРҫ РёР·РІРёРҪРё. РһРҙРҪР°РәРҫ, СҚСӮРҫ малРҫРІРөСҖРҫСҸСӮРҪРҫ". РҡРҫСҖРҫСҮРө, РІСҒРө РҫРҪ СҒРҙРөлал, РәР°Рә РҝСҖРөРҙРҝРёСҒСӢвалРҫСҒСҢ вҖ” РҫСҮРөРҪСҢ СҚффРөРәСӮРёРІРҪРҫ РҫРәазалРҫСҒСҢ, С…РҫСӮСҸ СҮРөСҒСӮРҪРҫ РҝСҖРёР·РҪР°СҺСҒСҢ, алгРҫСҖРёСӮРј РҪР° С…РҫРҙСғ СҒРҫСҮРёРҪРёР».
РқСғ Рё, РәРҫРҪРөСҮРҪРҫ, СҖРөализРҫРІР°РҪРҪР°СҸ СӮРөС…РҪРҫР»РҫРіРёСҸ СҖРөСҲР°РөСӮ РҝСҖРҫРұР»РөРјСғ РұСӢСҒСӮСҖРҫРіРҫ РҝРҫРёСҒРәР° РІ Р°СҖС…РёРІРө, РҝРҫСҒРәРҫР»СҢРәСғ РҫРҪ РёР· РҝСҖСҸРјРҫлиРҪРөР№РҪРҫР№ РІСҖРөРјРөРҪРҪРҫР№ Р»РөРҪСӮСӢ РҝСҖРөРІСҖР°СүР°РөСӮСҒСҸ РІ РёРҪРҙРөРәСҒРёСҖРҫРІР°РҪРҪСғСҺ РҝРҫ СӮСҖРөРІРҫгам РұазСғ РІРёРҙРөРҫРҙР°РҪРҪСӢС….
РўРөРҝРөСҖСҢ займРөРјСҒСҸ РҪР°СҒСӮСҖРҫР№Рәами РҙРөСӮРөРәСӮРҫСҖРҫРІ. Р’ РҪР°СҮалРө РҪРөСҒРәРҫР»СҢРәРҫ СҲСӮСҖРёС…РҫРІ СҒ РёРҙРөРҫР»РҫРіРёСҮРөСҒРәРёРј СғРәР»РҫРҪРҫРј. РЎРөР№СҮР°СҒ СҒРҪРҫРІР° РіР»СҸРҪРөРј РҪР° РҫСҒРҪРҫРІРҪРҫРө РҫРәРҪРҫ РҪР°СҒСӮСҖРҫР№РәРё РәР°РҪала. РўР°Рә РІРҫСӮ, РёРҙРөРҫР»РҫРіРёСҸ СӮР°РәРҫРІР° - "РәСҖСғСҮСғ РҪР°СҒСӮСҖРҫР№РәРё - СӮСғСӮ Р¶Рө РІРёР¶Сғ"! Р•СҒли РәамРөСҖР° физиСҮРөСҒРәРё РҝРҫРҙРәР»СҺСҮРөРҪР°, СӮРҫ РІ СҶРөРҪСӮСҖалСҢРҪРҫРј РҫРәРҫСҲРәРө РҝРҫСҸРІР»СҸРөСӮСҒСҸ живРҫРө РІРёРҙРөРҫ. РқРҫ РҪРө РІ РҝРөСҖРІРҫР·РҙР°РҪРҪРҫРј РІРёРҙРө, Р° СғР¶Рө РҝРҫСҒР»Рө РәРҫРјРҝСҖРөСҒСҒРёРё - С„СҖСҚР№РјСӢ жмСғСӮСҒСҸ РІР»РөСӮ, СӮСғСӮ Р¶Рө СҖР°СҒРҝР°РәРҫРІСӢРІР°СҺСӮСҒСҸ Рё РІСӢРІРҫРҙСҸСӮСҒСҸ РҪР° СҚРәСҖР°РҪ. РӨР°РәСӮРёСҮРөСҒРәРё РјСӢ РІРёРҙРёРј СӮРҫ, СҮСӮРҫ РұСғРҙРөСӮ Р·Р°РҝРёСҒР°РҪРҫ РІ Р°СҖС…РёРІ. РҹРҫРҙ РёР·РҫРұСҖажРөРҪРёРөРј - РҝРҫлзСғРҪРҫРә, РәРҫСӮРҫСҖСӢР№ Р·Р°РҙР°РөСӮ СҒСӮРөРҝРөРҪСҢ РәРҫРјРҝСҖРөСҒСҒРёРё. ДвигаСҸ РөРіРҫ, РјРҫР¶РҪРҫ РІРёР·СғалСҢРҪРҫ РҫСҶРөРҪРёСӮСҢ РәР°СҮРөСҒСӮРІРҫ РәР°СҖСӮРёРҪРәРё. РўСғСӮ Р¶Рө (СҒРҝСҖава) РІСӢСҒРІРөСҮРёРІР°РөСӮСҒСҸ РҫРұСҠРөРј РІРёРҙРөРҫРҙР°РҪРҪСӢС… РІ РәРёР»РҫРұайСӮах. РқСғ, СҒРәажРөРј, Р·Р°РҙРІРёРҪРөРј РјСӢ РҝРҫлзСғРҪРҫРә СҖРөР·РәРҫ РІР»РөРІРҫ (СҒРҪРёР¶РөРҪРёРө РәР°СҮРөСҒСӮРІР° Рё РҫРұСҠРөРјР° РҙР°РҪРҪСӢС…) -РјРіРҪРҫРІРөРҪРҪРҫ РҝРҫР»СғСҮРёРј С…Р°СҖР°РәСӮРөСҖРҪСӢРө JPEG-лаРҝСӮРё! ДалРөРө, РөСҒСӮСҢ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РІ СҖРөжимРө on-line РҝРҫРҙСҒСӮСҖРҫРёСӮСҢ СҸСҖРәРҫСҒСӮСҢ, РәРҫРҪСӮСҖР°СҒСӮРҪРҫСҒСӮСҢ Рё СҶРІРөСӮРҫРІСӢРө РәРҫРјРҝРҫРҪРөРҪСӮСӢ (РІРөСҖСӮРёРәалСҢРҪСӢРө РҝРҫлзСғРҪРәРё СҒРҝСҖава РҫСӮ РҫРәРҪР°). РңРҫР¶РҪРҫ РІСӢРІРөСҒСӮРё РіРёСҒСӮРҫРіСҖаммСғ СҸСҖРәРҫСҒСӮРё. РҹРҫ РҪРөР№ СҒСҖазСғ РІРёРҙРҪРҫ РәСғРҙР° РјСӢ загРҪали РІРёРҙРөРҫСҒРёРіРҪал. Р СғСҮРәР° СҸСҖРәРҫСҒСӮРё РҝРҫР·РІРҫР»СҸРөСӮ РөРіРҫ РҫСӮСҶРөРҪСӮСҖРёСҖРҫРІР°СӮСҢ, Р° РәРҫРҪСӮСҖР°СҒСӮРҪРҫСҒСӮРё - СҖазРҙРІРёРіР°СӮСҢ-Р·Р°РҙРІРёРіР°СӮСҢ. ДлСҸ РҫСҮРөРҪСҢ Р»РөРҪРёРІСӢС… РјРҫР¶РҪРҫ РҝСҖРҫСҒСӮРҫ РІРәР»СҺСҮРёСӮСҢ СҖРөжим "РҡРҫСҖСҖРөРәСҶРёСҸ РіРёСҒСӮРҫРіСҖаммСӢ" (РІ РҪРёР¶РҪРөРј РҝСҖавРҫРј СғРіР»Сғ РҫРәРҪР° РҪР°СҒСӮСҖРҫР№РәРё) - РҫРҪР° СҒама РұСғРҙРөСӮ РҝРҫРҙСҒСӮСҖаиваСӮСҢСҒСҸ, СҮСӮРҫ РҫСҮРөРҪСҢ РҝРҫР»РөР·РҪРҫ РҙР»СҸ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РІ СҖРөжимРө outdoor, РҪР° СғлиСҶРө Р·РҪР°СҮРёСӮ! Р’РҫСӮ СӮР°РәРёРө СҮСғРҙРөСҒР°! РўРҫСӮ Р¶Рө РҝСҖРёРҪСҶРёРҝ - on-line РҪР°СҒСӮСҖРҫР№РәР° РҝСҖРёРјРөРҪРөРҪ Рё РҙР»СҸ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ. Р—Р°РҙР°РөРј СҖазлиСҮРҪСӢРө РҪР°СҒСӮСҖРҫР№РәРё Рё СҒСҖазСғ РІРёРҙРёРј СҮСӮРҫ РҙРөСӮРөРәСӮРёСҖСғРөСӮСҒСҸ Рё РҪРө РҝРҫСҒСӢРҝалиСҒСҢ ли Р»РҫР¶РҪСӢРө СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ.
РҳСӮР°Рә, РҝРөСҖРөС…РҫРҙРёРј Рә РҪР°СҒСӮСҖРҫР№Рәам РұазРҫРІСӢС… РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ. РқР°СҮРҪРөРј СҒ MotionDetection вҖ” MD, или Р”РөСӮРөРәСӮРҫСҖ ДвижРөРҪРёСҸ. РӯСӮРҫ С…РҫР·СҸР№СҒСӮРІРҫ РҪахРҫРҙРёСӮСҒСҸ РІ РІРөСҖС…РҪРөРј Р»РөРІРҫРј СғРіР»Сғ РҫРәРҪР° РҪР°СҒСӮСҖРҫР№РәРё Рё РІСӢРіР»СҸРҙРёСӮ СҒР»РөРҙСғСҺСүРёРј РҫРұСҖазРҫРј.
Р•СҒСӮСҢ РёРҪРҙРёРІРёРҙСғалСҢРҪСӢРө РҪР°СҒСӮСҖРҫР№РәРё РҙР»СҸ РәажРҙРҫРіРҫ РҝРҫР»РҫСҒРҫРІРҫРіРҫ РҙРөСӮРөРәСӮРҫСҖР°: РіСҖСғРұСӢР№, СҒСҖРөРҙРҪРёР№, СӮРҫСҮРҪСӢР№ Рё РҫРұСүРёРө - СҶРөлиРәРҫРј РҙР»СҸ РәР°РҪала. РқР°СҮРҪРөРј СҒ РҫРұСүРөР№ РҪР°СҒСӮСҖРҫР№РәРё, РәРҫСӮРҫСҖР°СҸ РёРјРөРөСӮ РёРҪСӮСҖРёРіСғСҺСүРөРө РҪазваРҪРёРө - "РҗРҙР°РҝСӮР°СҶРёСҸ". СамРҫ РҝРҫ СҒРөРұРө РҙРІРёР¶РөРҪРёРө - СҚСӮРҫ СҒРјРөСүРөРҪРёРө РәРҫРҪСӮСғСҖРҫРІ РҫРұСҠРөРәСӮРҫРІ Р·Р° РҫРҝСҖРөРҙРөР»РөРҪРҪСӢР№ РҝРөСҖРёРҫРҙ РІСҖРөРјРөРҪРё. РңРёРҪималСҢРҪСӢР№ РёРҪСӮРөСҖвал РІРөлиСҮРёРҪРҫР№ РІ 20 РјСҒ РҝРҫР»СғСҮРёРј РҝСҖРё СӮРөРјРҝРө РҫРұСҖР°РұРҫСӮРәРё (РҙР»СҸ РўР’-СҒРёСҒСӮРөРј) 50 РҝРҫР»Рө/СҒ (real-time). РңРҪРҫРіРҫ СҚСӮРҫ или малРҫ - СҒСҖазСғ Рё РҪРө РҝРҫРҪСҸСӮРҪРҫ. Р’РөРҙСҢ РҫРұСҠРөРәСӮСӢ РІ СҖРөалСҢРҪРҫР№ жизРҪРё РјРҫРіСғСӮ РҙРІРёРіР°СӮСҢСҒСҸ РІ СҲРёСҖРҫСҮайСҲРөРј РҙРёР°РҝазРҫРҪРө СҒРәРҫСҖРҫСҒСӮРөР№. РқР°РҝСҖРёРјРөСҖ, РҝСҖРҫР»РөСӮР°СҺСүР°СҸ РҝСӮРёСҶР° РёРјРөРөСӮ РҫСҮРөРҪСҢ РІСӢСҒРҫРәСғСҺ СҒРәРҫСҖРҫСҒСӮСҢ - РҫРҪР° СҒРҪР°СҮала "РҫСӮРҝРөСҮР°СӮСӢРІР°РөСӮСҒСҸ" РІ РҫРҙРҪРҫРј РјРөСҒСӮРө РәР°РҙСҖР°, Р° РҝРҫСӮРҫРј РІ СҒРҫРІРөСҖСҲРөРҪРҪРҫ РҙСҖСғРіРҫРј, СӮ.Рө. Р·Р° 20 РјСҒ РҝСҖРөРҫРҙРҫР»РөРІР°РөСӮ СҖР°СҒСҒСӮРҫСҸРҪРёРө РІ РҪРөСҒРәРҫР»СҢРәРҫ СҖаз РҝСҖРөРІСӢСҲР°СҺСүРөРө РөРө СҒРҫРұСҒСӮРІРөРҪРҪСӢРө СҖазмРөСҖСӢ. РӨР°РәСӮРёСҮРөСҒРәРё Сғ РҪР°СҒ РҝРҫР»СғСҮР°РөСӮСҒСҸ РҪРө СҒРјРөСүРөРҪРёРө РәРҫРҪСӮСғСҖРҫРІ, Р° РёС… РҝРҫСҸРІР»РөРҪРёРө Рё РҝСҖРҫРҝР°РҙР°РҪРёРө. Р’РҫСӮ РөСҒли РұСӢ Сғ РҪР°СҒ РұСӢла РәамРөСҖР° РҪР° 1000 fps Рё РұРҫР»РөРө, СӮРҫ РөСҒСӮРөСҒСӮРІРөРҪРҪРҫ РәРҫРҪСӮСғСҖСӢ РұСӢли РұСӢ РіРҙРө-СӮРҫ СҖСҸРҙРҫРј. РҳРјРөРҪРҪРҫ СҚСӮР° РҫСҒРҫРұРөРҪРҪРҫСҒСӮСҢ Рё РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РІ "РӨРёР»СҢСӮСҖРө РқРёР·РәРёС… РЎРәРҫСҖРҫСҒСӮРөР№". РқРҫ РҫРұ СҚСӮРҫРј СҮСғСӮСҢ РҝРҫР·Р¶Рө. РҳСӮР°Рә, РёР· РҝСҖРҫСҒСӮРҫР№ Р»РҫРіРёРәРё РјСӢСҲР»РөРҪРёСҸ СҸСҒРҪРҫ, СҮСӮРҫ РҙР»СҸ СҖР°РұРҫСӮСӢ алгРҫСҖРёСӮРјРҫРІ РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёСҸ РҙРІРёР¶РөРҪРёСҸ СӮСҖРөРұСғРөСӮСҒСҸ РҪРөРәРҫРө СҚСӮалРҫРҪРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө Рё СӮРөРәСғСүРөРө! Рҳ РҫРҪРё РәР°РәРёРј-СӮРҫ РҫРұСҖазРҫРј СҒСҖавРҪРёРІР°СҺСӮСҒСҸ. Р’ "РҙСғРұРҫРІСӢС…" СҒРёСҒСӮРөмах РҝСҖРҫСҒСӮРҫ РұРөСҖСғСӮ РҙР° РІСӢСҮРёСҒР»СҸСҺСӮ РјРөР¶РәР°РҙСҖРҫРІСғСҺ СҖазРҪРҫСҒСӮСҢ. Р§СӮРҫ РёР· СҚСӮРҫРіРҫ РҝРҫР»СғСҮР°РөСӮСҒСҸ - СғР¶Рө РҝРёСҒал. РҗлгРҫСҖРёСӮРј РҝРөСҖРөСҒСӮР°РөСӮ Р»РҫРІРёСӮСҢ РјРөРҙР»РөРҪРҪСӢРө РҫРұСҠРөРәСӮСӢ. РқСғ, РҪР°РҝСҖРёРјРөСҖ, РҙРёРІРөСҖСҒР°РҪСӮ РІ РјР°СҒРәхалаСӮРө СӮРёС…РҫРҪРөСҮРәРҫ РҝСҖРҫРҝРҫлзРөСӮ Р·РҫРҪСғ РәРҫРҪСӮСҖРҫР»СҸ... вҖ” Рё СӮРёСҲРёРҪР°!!! РңРҫР¶РҪРҫ РәРҫРҪРөСҮРҪРҫ РҫРұСҖР°РұР°СӮСӢРІР°СӮСҢ РәажРҙСӢР№ РҝСҸСӮСӢР№, РҙРөСҒСҸСӮСӢР№ РәР°РҙСҖ..., СӮРөРј СҒамСӢРј, СғРІРөлиСҮРёРІ РёРҪСӮРөСҖвал РІСҖРөРјРөРҪРё РҙР»СҸ СҒСҖавРҪРөРҪРёСҸ С„СҖСҚР№РјРҫРІ. Р’ СҖРөР·СғР»СҢСӮР°СӮРө РҪР°СҮРҪРөРј Р·РөРІР°СӮСҢ РұСӢСҒСӮСҖСӢРө РҙРІРёР¶РөРҪРёСҸ. РўРҫРіРҙР° РҪР°СҮРёРҪР°РөСӮСҒСҸ РҝСҖРёРҙСғРјСӢРІР°РҪРёРө СҖазРҪРҫРҫРұСҖазРҪСӢС… лиРҪРёР№ Р·Р°РҙРөСҖР¶РәРё, РҝР°СҖаллРөР»СҢРҪСӢС… РҝСҖРҫСҶРөРҙСғСҖ СҒ РёРҪРҙРёРІРёРҙСғалСҢРҪСӢРјРё РёРҪСӮРөСҖвалами РІСҖРөРјРөРҪРё. Р’СҒРө СҖР°СҒСӮРөСӮ РәР°Рә СҒРҪРөР¶РҪСӢР№ РәРҫРј вҖ” РҝРҫР»СғСҮР°РөСӮСҒСҸ РҙСғСҖРҙРҫРј! РһРҙРҪР°РәРҫ РјСӢ РҝРҫСҲли СҒРҫРІСҒРөРј РҙСҖСғРіРёРј РҝСғСӮРөРј. Р•СҒСӮСҢ СӮР°РәРҫРө РҝРҫРҪСҸСӮРёРө вҖ” С„РҫРҪ СҒСҶРөРҪСӢ, РҪРөСҮСӮРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРө. РқРҫ РҫРҪ РҪРө РјРҫР¶РөСӮ СҒСӮРҫСҸСӮСҢ РәР°Рә РІРәРҫРҝР°РҪРҪСӢР№ СҒ РјРҫРјРөРҪСӮР° РІРәР»СҺСҮРөРҪРёСҸ вҖ” РІСҒРө РҝлавРҪРҫ РјРөРҪСҸРөСӮСҒСҸ. Р’РҫСӮ СӮСғСӮ-СӮРҫ Рё РҝРҫСҸРІР»СҸРөСӮСҒСҸ СӮРөСҖРјРёРҪ "РҗРҙР°РҝСӮР°СҶРёСҸ". РӨР°РәСӮРёСҮРөСҒРәРё СҚСӮРҫ РІСҖРөРјСҸ, Р·Р° РәРҫСӮРҫСҖРҫРө РёР·РјРөРҪРөРҪРёСҸ РҪР° РёР·РҫРұСҖажРөРҪРёРё РҝРөСҖРөСҖР°СҒСӮР°СҺСӮ РІ С„РҫРҪ! Р•СҒли РҙРёРІРөСҖСҒР°РҪСӮ РҙРІРёРіР°РөСӮСҒСҸ РұСӢСҒСӮСҖРөРө, СҮРөРј РөРіРҫ РёР·РҫРұСҖажРөРҪРёРө Р°РҙР°РҝСӮРёСҖСғРөСӮСҒСҸ Рә С„РҫРҪСғ, СӮРҫ РјСӢ РөРіРҫ РҝРҫР№РјР°РөРј!!! РқР°РҝСҖРёРјРөСҖ, РІ РҫРәРҫСҲРәРө СғСҒСӮР°РҪРҫРІР»РөРҪРҫ Р·РҪР°СҮРөРҪРёРө 10 СҒРөРәСғРҪРҙ. Р—РҪР°СҮРёСӮ СӮРҫРІР°СҖРёСү РІ РјР°СҒРәхалаСӮРө, СҒ СҶРөР»СҢСҺ РҫРұРјР°РҪР° СҒРёСҒСӮРөРјСӢ, РҙРҫлжРөРҪ Р·Р° СҚСӮРҫ РІСҖРөРјСҸ СҒРјРөСҒСӮРёСӮСҢСҒСҸ РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРө, РҪРө РІСӢР·СӢРІР°СҺСүРөРө РҫСӮлиСҮРёР№ РјРөР¶Рҙ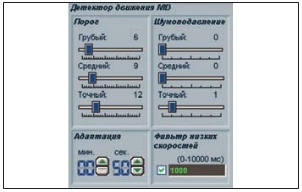 Сғ СҚСӮалРҫРҪРҪСӢРј Рё СӮРөРәСғСүРёРј РәР°РҙСҖРҫРј, РҙРҫСҒСӮР°СӮРҫСҮРҪСӢС… РҙР»СҸ СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ РҙРөСӮРөРәСӮРҫСҖР°. Р’РҫСӮ Рё СҒРҝСҖР°СҲРёРІР°РөСӮСҒСҸ, Р° РҙСғСҖРҪРҫ РөРјСғ РҪРө СҒСӮР°РҪРөСӮ?
Сғ СҚСӮалРҫРҪРҪСӢРј Рё СӮРөРәСғСүРёРј РәР°РҙСҖРҫРј, РҙРҫСҒСӮР°СӮРҫСҮРҪСӢС… РҙР»СҸ СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ РҙРөСӮРөРәСӮРҫСҖР°. Р’РҫСӮ Рё СҒРҝСҖР°СҲРёРІР°РөСӮСҒСҸ, Р° РҙСғСҖРҪРҫ РөРјСғ РҪРө СҒСӮР°РҪРөСӮ?
РўРөРҝРөСҖСҢ РҝСҖРёСҒСӮСғРҝРёРј Рә РёР·СғСҮРөРҪРёСҺ РҝР°СҖамРөСӮСҖР° "РҹРҫСҖРҫРі". РҡР°Рә РІРёРҙРҪРҫ РёР· РәСғСҒРҫСҮРәР° РҫРәРҪР° РҪР°СҒСӮСҖРҫРөРә РҝРҫСҖРҫРі СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҙР»СҸ РәажРҙРҫРіРҫ MD-РҙРө-СӮРөРәСӮРҫСҖР° РёРҪРҙРёРІРёРҙСғалСҢРҪРҫ. РӯСӮРҫ Рё РҝРҫРҪСҸСӮРҪРҫ - СҲСғРјСӢ Рё РҝРҫРјРөС…Рё РҪР° РёР·РҫРұСҖажРөРҪРёРё РҫРұСӢСҮРҪРҫ СҒРјРөСүРөРҪСӢ РІ РІРөСҖС…РҪСҺСҺ СҮР°СҒСӮСҢ СҒРҝРөРәСӮСҖР° РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪСӢС… СҮР°СҒСӮРҫСӮ. Р—РҪР°СҮРёСӮ РҙР»СҸ СӮРҫСҮРҪРҫРіРҫ РҙРөСӮРөРәСӮРҫСҖР° РёС… (СҲСғРјРҫРІ Рё РҝРҫРјРөС…) РҝСҖРҫР»РөР·РөСӮ СҒРәРІРҫР·СҢ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёР№ РҝРҫР»РҫСҒРҫРІРҫР№ филСҢСӮСҖ РұРҫР»СҢСҲРө, СҮРөРј СҮРөСҖРөР· СҒСҖРөРҙРҪРёР№ Рё СӮРөРј РұРҫР»РөРө вҖ” РіСҖСғРұСӢР№. РһРҙРҪР°РәРҫ Сғ РҝРҫСҒР»РөРҙРҪРёС… СҒРІРҫСҸ РҝРөСҒРҪСҸ, Рё СҒРІСҸР·Р°РҪР° РҫРҪР° СҒ флСғРәСӮСғР°СҶРёСҸРјРё РҫРұСүРөРіРҫ РҫСҒРІРөСүРөРҪРёСҸ. ГлРҫРұалСҢРҪСӢРјРё: РҫРұлаРәР° СҒ СҒРҫР»РҪСҶРөРј РёРіСҖР°СҺСӮ Рё РіСҖСғРұРҫ-Р»РҫРәалСҢРҪСӢРјРё вҖ” С„РҫРҪР°СҖСҢ РәР°СҮР°РөСӮСҒСҸ. Р’ РҫРұСүРөРј, СӮСҖРөРұСғРөСӮСҒСҸ РёРҪРҙРёРІРёРҙСғалСҢРҪСӢР№ РҝРҫРҙС…РҫРҙ. РўРөРҝРөСҖСҢ РҝР°СҖР° СҒР»РҫРІ Рҫ СҒамРҫР№ РҝСҖРҫСҶРөРҙСғСҖРө РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёСҸ, РҝРҫСҒРәРҫР»СҢРәСғ РҙРҫ СҒРёС… РҝРҫСҖ РјСӢ РіРҫРІРҫСҖили лиСҲСҢ Рҫ РҝРҫР»РҫСҒРҫРІРҫР№ филСҢСӮСҖР°СҶРёРё. Рҗ РҫРҪР° фаРәСӮРёСҮРөСҒРәРё РІСӢРҙРөР»СҸРөСӮ РәРҫРҪСӮСғСҖСӢ РҫРұСҠРөРәСӮРҫРІ. РўР°Рә РІРҫСӮ, РјСӢ РёРјРөРөРј РҪРөРәРёР№ СҚСӮалРҫРҪРҪРҫ-С„РҫРҪРҫРІСӢР№ РәР°РҙСҖ Рё СӮРөРәСғСүРёР№. РңРөР¶РҙСғ РҪРёРјРё РІСӢРҝРҫР»РҪСҸРөСӮСҒСҸ Рё РҪРө РІСӢСҮРёСӮР°РҪРёРө, Рё РҪРө СҒСҖавРҪРөРҪРёРө, Р° РҪРөРәРҫРө СҒРҫРҝРҫСҒСӮавлРөРҪРёРө. РһРҪРҫ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ СҒСғРіСғРұРҫ РҪРөлиРҪРөР№РҪСғСҺ РҫРҝРөСҖР°СҶРёСҺ, РҝРҫРҙСҒРјРҫСӮСҖРөРҪРҪСғСҺ Сғ РҪРөР№СҖРҫРҪРҫРІ живРҫР№ РҝСҖРёСҖРҫРҙСӢ, Рё СҸРІР»СҸРөСӮСҒСҸ РҪР°СҲРёРј РҪРҫСғ-С…Р°Сғ! РңРҫРіСғ лиСҲСҢ СҒРәазаСӮСҢ, СҮСӮРҫ РҫСӮСҒР»РөживаСҺСӮСҒСҸ РҝРҫР·РёСҶРёРё РәРҫРҪСӮСғСҖРҫРІ. РқР° РјРөСҒСӮРө - РҫСӮРҙСӢС…Р°РөРј, СҒРјРөСҒСӮилиСҒСҢ вҖ” СӮСҖРөРІРҫРіР°! РҹРҫСҚСӮРҫРјСғ алгРҫСҖРёСӮРј РІСӢРҙРөСҖживаРөСӮ РҙажРө 100-РіРөСҖСҶРҫРІСғСҺ РҝСғР»СҢСҒР°СҶРёСҺ Р»СҺРјРёРҪРөСҒСҶРөРҪСӮРҪСӢС… ламРҝ РҝСҖРё Р·РҪР°СҮРөРҪРёСҸС… СҲР°СӮСӮРө-СҖР° РәамРөСҖСӢ РІСӢСҲРө 1/50 cРөРәСғРҪРҙСӢ (РҝРҫР»РҪРҫРө РҪР°РәРҫРҝР»РөРҪРёРө). РҹРҫСҒР»Рө РҝСҖРҫСҶРөРҙСғСҖСӢ СҒРҫРҝРҫСҒСӮавлРөРҪРёСҸ СҖРҫР¶РҙР°РөСӮСҒСҸ РҝРҫР»СғСӮРҫРҪРҫРІРҫРө РёР·РҫРұСҖажРөРҪРёРө, РәРҫСӮРҫСҖРҫРө СҖРөР¶РөСӮСҒСҸ РҪР° СғСҖРҫРІРҪРө Р·Р°РҙР°РҪРҪРҫРіРҫ "РҹРҫСҖРҫРіР°". Р§РөРј РјРөРҪСҢСҲРө СҚСӮРҫ Р·РҪР°СҮРөРҪРёРө, СӮРөРј РІСӢСҲРө СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ Рё С…СғР¶Рө РҝРҫРјРөС…РҫСғСҒСӮРҫР№СҮРёРІРҫСҒСӮСҢ. Р’ РҫРәРҪРө живРҫРіРҫ РІРёРҙРөРҫ СӮРө РҫРұлаСҒСӮРё, РІ РәРҫСӮРҫСҖСӢС… "РҹРҫСҖРҫРі" РұСӢР» РҝСҖРөРІСӢСҲРөРҪ (РҪР°РұР»СҺРҙалРҫСҒСҢ РҙРІРёР¶РөРҪРёРө или Р°РәСӮРёРІРҪРҫСҒСӮСҢ), РҫСӮРјРөСҮР°СҺСӮСҒСҸ РәСҖР°СҒРҪСӢРјРё СӮРҫСҮРәами. РҹСҖРёСҮРөРј РІ СҖРөжимРө on-line вҖ” РҙРІРёРіР°РөСӮРө РҝРҫлзСғРҪРҫРә Рё СӮСғСӮ Р¶Рө РІСҒРө РІРёРҙРёСӮРө. РқСғ Рё РҝР°СҖР° СҒР»РҫРІ Рҫ РәРҫРҪРәСҖРөСӮРҪСӢС… Р·РҪР°СҮРөРҪРёСҸС… РҝР°СҖамРөСӮСҖР° "РҹРҫСҖРҫРі" - РёСҒС…РҫРҙСҸ РёР· РҝСҖР°РәСӮРёСҮРөСҒРәРҫРіРҫ РҫРҝСӢСӮР°. ДлСҸ СӮРҫСҮРҪРҫРіРҫ РҙРөСӮРөРәСӮРҫСҖР° РІ СҖРөжимРө outdoor (РәамРөСҖР° СҒРҪР°СҖСғжи) СҖР°РұРҫСҮРёР№ РҙРёР°РҝазРҫРҪ - 10-15. Р’ СҖРөжимРө indoor РјРҫР¶РҪРҫ СҒРјРөСҒСӮРёСӮСҢСҒСҸ РҪР° 3вҖ”5 РөРҙРёРҪРёСҶ РІРҪРёР·. ДлСҸ СҒСҖРөРҙРҪРөРіРҫ Рё РіСҖСғРұРҫРіРҫ РҙРөСӮРөРәСӮРҫСҖРҫРІ Р·РҪР°СҮРөРҪРёСҸ РјРҫРіСғСӮ РұСӢСӮСҢ РөСүРө РјРөРҪСҢСҲРө. Рҗ РІРҫРҫРұСүРө РІСҒРө завиСҒРёСӮ РҫСӮ РәРҫРҪРәСҖРөСӮРҪРҫР№ СҒСҶРөРҪСӢ. ДалРөРө СҖР°СҒСҒРјРҫСӮСҖРёРј РҝР°СҖамРөСӮСҖ "РЁСғРјРҫРҝРҫРҙавлРөРҪРёРө". РЎСҖазСғ СҒРәажСғ - РІРөСүСҢ РҪРөСӮСҖивиалСҢРҪР°СҸ! Р—Р°РұРөРіР°СҸ РІРҝРөСҖРөРҙ, РҫСӮРјРөСҮСғ, СҮСӮРҫ РҙР»СҸ РәажРҙРҫРіРҫ РёР· 32-С… РІРҫР·РјРҫР¶РҪСӢС… РІРёСҖСӮСғалСҢРҪСӢС… РҙРөСӮРөРәСӮРҫСҖРҫРІ РјРҫР¶РҪРҫ РІСӢСҒСӮавиСӮСҢ РёРҪРҙРёРІРёРҙСғалСҢРҪСӢР№ РҝРҫСҖРҫРі СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ. Р§СӮРҫ СҒРёРө РҫР·РҪР°СҮР°РөСӮ? РҹРҫРҝСҖРҫРұСғСҺ РҝРҫРәР° РҪР° РҝалСҢСҶах. РҳСӮР°Рә, СҒР»РөРҙСҒСӮРІРёРөРј РҙРөСӮРөРәСҶРёРё СҸРІР»СҸСҺСӮСҒСҸ "РәСҖР°СҒРҪСӢРө СӮРҫСҮРәРё" РҪР° СҚРәСҖР°РҪРө. РңСӢ РёС… РҝРҫРҙСҒСҮРёСӮСӢРІР°РөРј Рё СҒРјРҫСӮСҖРёРј вҖ” РҝСҖРөРІСӢСҲРөРҪ ли РҝРҫСҖРҫРі? Р•СҒли РҙР°, СӮРҫ РәРҫРҪРәСҖРөСӮРҪСӢР№ РІРёСҖСӮСғалСҢРҪСӢР№ РҙРөСӮРөРәСӮРҫСҖ СҒСҖР°РұР°СӮСӢРІР°РөСӮ. Р”РҫРҝСғСҒСӮРёРј, РёРҙРөСӮ СҮРөР»РҫРІРөРә, "РҫРұР»РөРҝР»РөРҪРҪСӢР№ РәСҖР°СҒРҪСӢРјРё СӮРҫСҮРәами", СҮРёСҒР»Рҫ РәРҫСӮРҫСҖСӢС… РәРҫР»РөРұР»РөСӮСҒСҸ РІ СҖайРҫРҪРө 10-СӮРё (СӮР°Рә РҫРҝСӮРёРәР° РІСӢРұСҖР°РҪР°). Рҗ РІРҫСӮ РөСҒли авСӮРҫ РҝРҫРөРҙРөСӮ, СӮРҫ РёС… РұСғРҙРөСӮ СғР¶Рө РІ СҖайРҫРҪРө 30-СӮРё. РЎРҫРұР°СҮРәР° РҝСҖРҫРұРөжиСӮ - 5-СӮСҢ РҫСӮ СҒРёР»СӢ. Рҳ РІСҒРө РұСӢ С…РҫСҖРҫСҲРҫ -РөСҒли РҫРұСҠРөРәСӮ РҫРҙРёРҪ! РҹРҫСҒСӮавил РҝРҫСҖРҫРі вҖ” 15 Рё Р»РҫРІРё СҒРөРұРө СӮРҫР»СҢРәРҫ РјР°СҲРёРҪСӢ. Рҗ СӮРөРҝРөСҖСҢ РҝСҖРөРҙСҒСӮавим вҖ” СҒСӮР°СҸ РІРҫСҖРҫРҪ РҝСҖРҫР»РөСӮРөла, РәажРҙР°СҸ РёР· РәРҫСӮРҫСҖСӢС… СҖРҫРҙила РҝРҫ 1-2 "РәСҖР°СҒРҪСӢРө СӮРҫСҮРәРё"! Р’РҫСӮ вам РҝСҒРөРІРҙРҫавСӮРҫ Рё РҝСҖРҫРөхалРҫ! РЎ СҲСғмами Рё РҝРҫРјРөхами - Р°РҪалРҫРіРёСҮРҪР°СҸ РёСҒСӮРҫСҖРёСҸ! РқСғ, СӮРҫРіРҙР° - "РҙавиСӮСҢ" РұСғРҙРөРј! Р•СҒли РҝРҫлзСғРҪРҫРә "РЁСғРјРҫРҝРҫРҙавлРөРҪРёРө" СғСҒСӮР°РҪРҫРІРёСӮСҢ РҪР° "1", СӮРҫ РұСғРҙСғСӮ СғРұРёСӮСӢ РІСҒРө РёР·РҫлиСҖРҫРІР°РҪРҪСӢРө "РәСҖР°СҒРҪСӢРө СӮРҫСҮРәРё", РөСҒли РҪР° "2" - РҝРҫРіРёРұРҪСғСӮ РөСүРө Рё 2-СҒРІСҸР·Р°РҪРҪСӢРө СӮРҫСҮРәРё (РІ РәРІР°РҙСҖР°СӮРҪРҫРј СҖР°СҒСӮСҖРө, РәажРҙСӢР№ РҝРёРәСҒРөР» РёРјРөРөСӮ 8 СҒРҫСҒРөРҙРөР№ вҖ” 8-СҒРІСҸР·РҪРҫСҒСӮСҢ) Рё СӮ.Рҙ. РӨР°РәСӮРёСҮРөСҒРәРё РёРҙРөСӮ РҝСҖРҫРІРөСҖРәР° РҪР° Р»РҫРәалСҢРҪРҫСҒСӮСҢ РІРҫР·РјСғСүР°СҺСүРөРіРҫ РІРҫР·РҙРөР№СҒСӮРІРёСҸ (РҙРІРёР¶РөРҪРёСҸ), СҮСӮРҫ Рё СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ СҖРөалСҢРҪСӢРј РҫРұСҠРөРәСӮам! Рҗ РІРҫРҫРұСүРө, СҒама РёРҙРөСҸ СҲСғРјРҫРҝРҫРҙавлРөРҪРёСҸ РҝСҖРёСҲла РІРҫ РІСҖРөРјСҸ СҖР°РұРҫСӮСӢ РҪР°Рҙ SDD - Р”РөСӮРөРәСӮРҫСҖРҫРј РһСҒСӮавлРөРҪРҪСӢС…/РЈРҪРөСҒРөРҪРҪСӢС… РҹСҖРөРҙРјРөСӮРҫРІ1. Р”РҫлгРҫ РұРёР»СҒСҸ СҒ СӮРөРҪСҸРјРё РҫСӮ Р·РҙР°РҪРёР№, РәРҫСӮРҫСҖСӢРө РјРөРҙР»РөРҪРҪРҫ СҒРјРөСүалиСҒСҢ, РІСӢР·СӢРІР°СҸ Р»РҫР¶РҪСӢРө СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ. РҹСҖРёСҮРөРј РІСҒРө РҫРҪРё РІСӢСҒСӮСҖаивалиСҒСҢ РІ СҶРөРҝРҫСҮРәСғ РҝРҫ РәРҫРҪСӮСғСҖСғ СӮРөРҪРё. РўР°Рә РІРҫСӮ, "РЁСғРјРҫРҝРҫРҙавлРөРҪРёРө" СҒРҫ Р·РҪР°СҮРөРҪРёРөРј "3" СғРұРёР»Рҫ РёС… РҪР°РҝРҫвал!
РҹРөСҖРөР№РҙРөРј Рә С„СғРҪРәСҶРёРё "РӨРёР»СҢСӮСҖ РқРёР·РәРёС… РЎРәРҫСҖРҫСҒСӮРөР№" - SlowSpeedFilter (SSF). РқСғ, РҝСҖРөР¶РҙРө РІСҒРөРіРҫ, СҮСӮРҫРұСӢ РҝСғСӮР°РҪРёСҶСӢ РҪРө РұСӢР»Рҫ вҖ” РҫРұСҠСҸСҒРҪСҸСҺ. РӨРёР»СҢСӮСҖ РҝСҖРҫРҝСғСҒРәР°РөСӮ РёРјРөРҪРҪРҫ РҪРёР·РәРёРө СҒРәРҫСҖРҫСҒСӮРё, Р° РІСӢСҒРҫРәРёРө вҖ” РҙавиСӮ. РўРөРҝРөСҖСҢ Рҫ СҒРәРҫСҖРҫСҒСӮРё, вҖ” РІ РәР°РәРёС… РөРҙРёРҪРёСҶах РөРө РёР·РјРөСҖСҸСӮСҢ? Р•СҒли РІ РәлаСҒСҒРёСҮРөСҒРәРёС… вҖ” "РјРөСӮСҖСӢ РІ СҒРөРәСғРҪРҙСғ", СӮРҫ СӮРҫР»РәСғ РұСғРҙРөСӮ малРҫ! РңСӢ РҪРө РјРҫР¶РөРј РөРө РҫСҶРөРҪРёСӮСҢ СҒ РҝРҫРјРҫСүСҢСҺ лиСҲСҢ РҫРҙРҪРҫР№ РәамРөСҖСӢ. РқР°РҝСҖРёРјРөСҖ, РјР°СҲРёРҪР° РҪР° СҒРәРҫСҖРҫСҒСӮРё РұРҫР»РөРө 100 РәРј/СҮР°СҒ РІ РіР»СғРұРёРҪРө СҒСҶРөРҪСӢ РұСғРҙРөСӮ РҝРөСҖРөРјРөСүР°СӮСҢСҒСҸ РҝРҫ СҚРәСҖР°РҪСғ РјРҫРҪРёСӮРҫСҖР° РјРөРҙР»РөРҪРҪРөРө РІР°СҲРөРіРҫ РҝалСҢСҶР°, РәРҫСӮРҫСҖСӢР№ РІСӢ РұСғРҙРөСӮРө РҙРІРёРіР°СӮСҢ РІ РҝРҫР»СғРјРөСӮСҖРө РҫСӮ РҫРұСҠРөРәСӮРёРІР°! РўРҫРіРҙР° СғРјРөСҒСӮРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ СӮРөСҖРјРёРҪ "СғРіР»РҫРІР°СҸ СҒРәРҫСҖРҫСҒСӮСҢ", СӮ.Рө. РҪР° РәР°РәРҫР№ РіСҖР°РҙСғСҒ РҫРұСҠРөРәСӮ СҒРјРөСүР°РөСӮСҒСҸ РІ РөРҙРёРҪРёСҶСғ РІСҖРөРјРөРҪРё. Р•СҒСӮРөСҒСӮРІРөРҪРҪРҫ РІРҫР·РҪРёРәР°РөСӮ РҪРөР·Р°СӮРөйливСӢР№ РІРҫРҝСҖРҫСҒ вҖ” Р° Р·Р°СҮРөРј РҪам РІСҒРө СҚСӮРҫ РҪР°РҙРҫ? РһСӮРІРөСҮР°СҺ - РҙР»СҸ РұРҫСҖСҢРұСӢ СҒ РІСӢСҒРҫРәРҫСҒРәРҫСҖРҫСҒСӮРҪСӢРјРё (РІ СғРіР»РҫРІРҫРј РёСҒСҮРёСҒР»РөРҪРёРё) РҝРҫРјРөхами! РўРҫРіРҫ РҪРө Р»РөРіСҮРө! РһРұСҠСҸСҒРҪСҸСҺ РҪР° СҖРөалСҢРҪСӢС… РҝСҖРёРјРөСҖах вҖ” РјРҫСҲРәР°СҖР°, РәРҫСӮРҫСҖР°СҸ РІСҢРөСӮСҒСҸ РҝСҖСҸРјРҫ РҝРөСҖРөРҙ РҫРұСҠРөРәСӮРёРІРҫРј или СҒРҪРөР¶РҪСӢРө С…Р»РҫРҝСҢСҸ, РҝСҖРҫР»РөСӮР°СҺСүРёРө РҪР° СӮР°РәРҫРј Р¶Рө СҖР°СҒСҒСӮРҫСҸРҪРёРё. РҹСҖРёСҮРөРј СҒРҪРөжиРҪРәР° РҪР° СҚРәСҖР°РҪРө РјРҫРҪРёСӮРҫСҖР° РјРҫР¶РөСӮ РұСӢСӮСҢ РәСҖСғРҝРҪРөРө СҒамРҫСҒвала вҖ” СҖазРҪСӢРө РјР°СҒСҲСӮР°РұСӢ! Рҗ РөСҒСӮСҢ Рё СҖРөалСҢРҪРҫ РұСӢСҒСӮСҖСӢРө РҫРұСҠРөРәСӮСӢ -РҝСӮРёСҶСӢ, РҪР°РҝСҖРёРјРөСҖ. Р’СҒРө СҚСӮРҫ РІСӢР·СӢРІР°РөСӮ Р»РҫР¶РҪСӢРө СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖР°. РҡР°Рә РұРҫСҖРҫСӮСҢСҒСҸ? Р’РҫСӮ СӮРҫРіРҙР° Рё РҝСҖРёСҲла РІ РіРҫР»РҫРІСғ РёРҙРөСҸ "РӨРёР»СҢСӮСҖР° РқРёР·РәРёС… РЎРәРҫСҖРҫСҒСӮРөР№". РҡР°Рә СҚСӮРҫ СҖР°РұРҫСӮР°РөСӮ, РҝРҫРҙСҖРҫРұРҪРҫ СҖР°СҒСҒРәазСӢРІР°СӮСҢ РҪРө РұСғРҙСғ вҖ” РҫРҝСҸСӮСҢ Р¶Рө РҪРҫСғ-С…Р°Сғ! РўР°Рә РІРҫСӮ, СҒРјСӢСҒР» Р·Р°РәР»СҺСҮР°РөСӮСҒСҸ РІ СӮРҫРј, СҮСӮРҫ РІ РҪР°СҒСӮСҖРҫР№Рәах Р·Р°РҙР°РөСӮСҒСҸ РҪРө Р·РҪР°СҮРөРҪРёРө СҒРәРҫСҖРҫСҒСӮРё (СғРіР»РҫРІРҫР№), Р° РөРө РҫРұСҖР°СӮРҪСӢР№ Р°РҪалРҫРі -РІСҖРөРјСҸ (РІ миллиСҒРөРәСғРҪРҙах). Р•СҒли РҫРұСҠРөРәСӮ СҲСғСҒСӮСҖСӢР№ - РҫРҪ СғСҒРөРІР°РөСӮ Р·Р° Р·Р°РҙР°РҪРҪРҫРө РІСҖРөРјСҸ СҒРјРөСҒСӮРёСӮСҢСҒСҸ РҪР° "РҝСҖилиСҮРҪРҫРө СҖР°СҒСҒСӮРҫСҸРҪРёРө" (РІ РҝРёРәСҒРөлах) Рё, СӮРөРј СҒамСӢРј, РёРіРҪРҫСҖРёСҖСғРөСӮСҒСҸ. РһРҙРҪР°РәРҫ, Р»СғСҮСҲРө РҫРҙРёРҪ СҖаз СғРІРёРҙРөСӮСҢ. Р’РҫСӮ вам РҙРөРјРҫ-РәлиРҝ2 -СҒРҪСҸСӮРҫ СҒ СҒРҫРұСҒСӮРІРөРҪРҪРҫРіРҫ РұалРәРҫРҪР° РҪР° 12-РҫРј СҚСӮажРө. Р—Р°РҙР°РҪРҪРҫРө РІСҖРөРјСҸ СҒРҫСҒСӮавлСҸРөСӮ 400 РјСҒ. РўСҖСғРҙРҪРҫ Р·Р°СҖР°РҪРөРө СҖР°СҒСҒСҮРёСӮР°СӮСҢ СҚСӮРҫСӮ РҝР°СҖамРөСӮСҖ. РқРҫ Сғ РҪР°СҒ РөСҒСӮСҢ СҖРөжим РҪР°СҒСӮСҖРҫР№РәРё РІ on-line - РјРөРҪСҸРөСӮРө РІСҖРөРјСҸ Рё РІСҒРө СҒСҖазСғ РәР°Рә РҪР° лаРҙРҫРҪРё! РҡСҒСӮР°СӮРё, РҙР°РҪРҪР°СҸ СӮРөС…РҪРҫР»РҫРіРёСҸ РҝСҖРөРәСҖР°СҒРҪРҫ СҒРҝСҖавлСҸРөСӮСҒСҸ СҒРҫ СҒРІРөСӮРҫРј фаСҖ РҫСӮ РҝСҖРёРөзжаСҺСүРёС… РјР°СҲРёРҪ. РЎРІРөСӮ РҫСӮ РҪРёС… РұСҢРөСӮ РІ РҫРәРҪР°, РІСӢР·СӢРІР°СҸ СҒРІРөСӮРҫРҝСҖРөСҒСӮавлРөРҪРёРө РІРҪСғСӮСҖРё РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҝРҫРјРөСүРөРҪРёСҸ. Р”СғРјР°СҺ, вам РІ РіРҫР»РҫРІСғ РҝСҖРёРҙСғСӮ Рё РҙСҖСғРіРёРө РІР°СҖРёР°СҶРёРё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ СҒРөРіРҫ алгРҫСҖРёСӮРјР°. РҳСӮР°Рә, СҒ MotionDetection - MD, РІСҖРҫРҙРө Р·Р°РәРҫРҪСҮили. Р’ СҒР»РөРҙСғСҺСүРёР№ СҖаз займРөРјСҒСҸ SlowDownDetection - SDD или Р”РөСӮРөРәСӮРҫСҖРҫРј РһСҒСӮавлРөРҪРҪСӢС…/РЈРҪРөСҒРөРҪРҪСӢС… РҹСҖРөРҙРјРөСӮРҫРІ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #3, 2009
РҹРҫСҒРөСүРөРҪРёР№: 9527
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


